�����������˹����ܼ������������������ؼ����ķ�չ�����ƶ������˵��о�Խ��Խ�㷺��������Dz���OpenWrt����ϵͳ���ƶ������ˣ�����ʵ�ֶ��ֲ�ͬ���ܣ���̽�����顢Ѳ�ӡ�ͼ��ɼ�����λ������ͨ�ŵȡ�����������Ϊ�������ܿ��Ʒ���(������̬���ϡ�·���滮��Ⱥ��Э������)���������壬��չ�о���
1 ϵͳ����
����2��ܹ����ϲ���ARM������S3C2440Ϊ���ģ�ѡ��MINI2440��������Ϊ�ϲ�����壬����ͼ��ɼ�������ͼ��ͨ��Wi��Fi��ʽ����Զ�˵�PC����Wi��Fi����ͨ��������PC��������·���������ƽ̨��ͬʵ�ֵġ�
�²�����51��Ƭ��Ϊ���ĵĵ�Ƭ�����ư壬��51��Ƭ������Χ��·��ɡ��²���Ҫ����������ƶ����ƣ����������ݴ�����51��Ƭ��ͨ��I/O�����PWM�źſ���ֱ�������ת�ٺ�ת��ʵ�ֻ����˵�ǰ����ֹͣ����ת����ת����Ƭ���ӿڵ�·�Ϲҽ���1�����������ģ�顢1����������Ӧģ�顢1���������ģ�顣���������ģ������ʵ�ֻ����˱��ϡ���Ƕ��ʽ���ܵ�ǰ�˰�װ��һ����������������������ģ�鰲���ڲ��������ת���ϣ����������ͣ������ת�������������ģ��Ҳ��֮ת����������1�����������ģ��Ϳ�ʵ�ֶλ��࣬�Ӷ������˳��������ģ���������
��������Ҫ��Ӳ��ϵͳ������ϵͳ���ɡ�Ӳ��ϵͳ��Ҫ������ARM����������Ƭ������Χ�ӿڵ�·�������˵����Լ���Դ�ȡ�����ARM���������ϲ�ĺ��ģ�51��Ƭ�����²�ĺ��ġ�����������Ƕ��ʽLinux����ϵͳ��������������LinuxӦ�ó����Լ���Ƭ��Ӧ�ó���ȡ�ϵͳû��ѡ��ͨ����Ƕ��ʽLinux�汾�����������辶��ѡ��һ�ֶ��ص�Ƕ��ʽLinux���а�֮һOpenWrt��Ϊ����ϵͳ��OpenWrt�ṩ��һ����ȫ��д���ļ�ϵͳ����������������ͨ�������õķ�ʽ��������Ƕ��ʽLinux�������ż��������ϵͳ����������Ч�ʡ�
Ƕ��ʽ�����ƶ������˵Ĺ�������Ϊ��������ģ��ʵʱ�ɼ���Χ������Ϣ������������Ϣ���䵽�����˿���ϵͳ�У���Ƭ��ͨ�����ݷ�����ȡ��Ч���ݣ��Ӷ���֪���������ϰ�������λ�ã�Ȼ����ݴ�λ����Ϣ���������ź�;��Ƭ������PWM�źſ���ֱ����������ƻ�����ת�Ӷ��ﵽ����������“����”��Ŀ�ġ��²�ĵ�Ƭ�����ϲ��ARM������ͨ��������ͨ�ţ�ARM����ɽ��²㵥Ƭ�����ư�Ĺ�������ͨ������Wi��Fi�ķ�ʽ���䵽Զ�˵�PC����ARM������Բ���ϵؽ�USB����ͷ�ɼ��������ֳ�ͼƬ����Զ�˵�PC�����նˡ�
2 ϵͳӲ�����
Ӳ��ϵͳ��Ҫ������ARM����������Ƭ������Χ�ӿڵ�·�������˵����Լ���Դ�ȣ�����ARM���������ϲ�ĺ��ģ�51��Ƭ�����²�ĺ��ġ�Ӳ���ṹ��ͼ��ͼ1��ʾ��
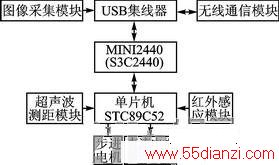
ͼ1 Ӳ���ṹ��ͼ
��ͼ1���Կ�����ϵͳ��Ҫ������ģ�鹹�ɣ�ͼ��ɼ�ģ�顢����ͨ��ģ�顢���������ģ�顢�����Ӧģ�顢MINI2440����Ƭ��STC89C52�Լ�ֱ���������ģ��ȡ������ص����ֱ���������ģ�顣
ֱ���������ģ����L298NоƬΪ���ģ���оƬ���д�������ǿ���ص㡣ֱ�����������·��ͼ2��ʾ��������·оƬ����Χ��·��Ҫ���ɶ����ܹ��ɵĵ��ŵ�·��2�����������ӣ��Դﵽ���Ƶ�������趨��ת��Ŀ�ġ�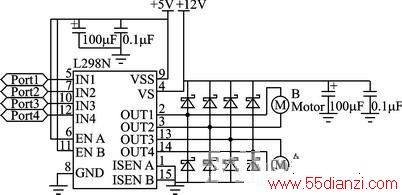
ͼ2 ֱ�����������·
�ƶ������˲���H�ſ��Ʒ�����������Ʒ�����ͼ3��ʾ��
ͼ3 H�ſ��Ʒ���
�������4·PWM����ֱ���Ϊ�����ֵ���������ͨ��2·PWM����ɿ���һ���������������Բ�����ʽ���ӡ�
��L298NоƬʹ���ź�ENABLEΪ��ʱ�������������仯������Ϊ����̬�����Ժ���ʱ��ENABLE���ż���Դ����VS���ӵ�ԴVCC.
������������Ϊ��ͨ������ɿ���оƬ��PWM���������źţ�PWM�����ΪL298N�����룬��L298Nת����������ź�ʹ���ת�����Ӷ�ʵ�ֵ綯����������
PWM����źŵĸߵ�����Կ���ֱ�����ת�١���ռ�ձȼӴ�ʱ��ת������;ռ�ձȼ�Сʱ��ת�ٽ���;��PWM�ź����ռ�ձ�Ϊ0ʱ�ɿ��Ƶ����ֹͣ��
������ֹͣ������תʱ��С����ת;������ֹͣ������ת��ʱ��С����ת����2·PWM���������˳��ת����ɿ��Ƶ��������ת����������С����ǰ���ͺ��ˡ�
3 ϵͳ�������
�����������ƶ������˵����ܻ������֣��������ƶ����������е�����״̬��
����ϵͳ������OpenWrt����ϵͳ����ϵͳ����Linux�ں˵Ķ��ƹ��̣���������������ʹ���������ĸ���������Ƕ��ʽ�豸���Ӷ�����Ƕ���������������̡�
������Kubuntu CodeBLOCk IDE���ɿ��������н��б�д����Openwrt���������ARM eabi������빤�߱��룬�پ����ն�SercurtCRTͨ�����п����ƶ��ն����뽻������ij����Լ�ϵͳ��
Ӧ����������С���ı��ϡ���������Ƶ����Ϊ��ͨ�ŷ���ͨ������������vsftp��������FTP����������ͨ��IEEE 802.11g(RTL8187)���������������߾��������������ƶ��ն˾Ϳ��Խ�����λ���Ŀ��������ָ���ص����ղ�����ͼƬ����PC���ն˾Ϳ��Խ���ͨ��Wi��Fi��������ͼƬ��
ϵͳ�����ṹ��ͼ4��ʾ��
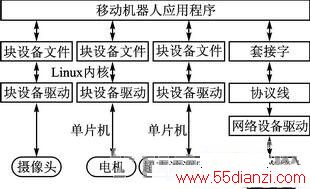
ͼ4 ϵͳ�����ṹ
ϵͳ������������MINI2440�������ṩ�����̽��и�д����������ںˡ�
����ͷ��������mjpgstreamer��Openwrt����������ʽ�ṩ��ͨ���˿�8080���ΪMJPEG��ʽ��ͼ������ͨ�Ų�������ΪLinux��socket��̣�Ϊ�ͻ����ṩԶ�̿���֧�֡�����ͨ�ŵIJ��ִ������£�
int sendstring(char *addr,int port,char *sendchar){
struct sockaddr_in s_addr;//����sockaddr_in�ṹ�����ͱ���socket��Ϣ
int sock;
int addr_len;
int len,i;
if ((sock=socket(AF_INET, SOCK_DGRAM, 0))==-1) {//����socket
perror(“no socket”);
exit(errno);
}
else
printf(“create socket.\n\r”);
s_addr.sin_family=AF_INET;//TCP/IP��ַ��
if (port)
s_addr.sin_port=htons(port);//���ö˿ں�
else
s_addr.sin_port=htons(10001);
if (*addr)
s_addr.sin_addr.s_addr=inet_addr(addr);//����IP
else {
printf(“Send a message must have a receiver!\n”);
exit(0);
}
addr_len=sizeof(s_addr);//IP��ַ����
len=-1;//���Ƿ��ͳɹ���־
for (i=0;i<4;i++) {//����
if(len<0)len=sendto(sock,sendchar, strlen(sendchar)�� 0,(struct sockaddr *) &s_addr, addr_len);
else {printf(“send suCCess!”);return 0;}
}
printf(“send error!”);
return 0;
}
ϵͳͨ��MINI2440��������������ͷ��ͨ�����ڿ��Ƶײ�ĵ�Ƭ���������������������ӣ����з���ˣ��ṩUI���档������ɺ��OpenwrtЧ��ͼ��ͼ5��ʾ��
ͼ5 ������ɵ�OpenWrtЧ��ͼ
����
��ϵͳѡ�õ�OpenWrt����ϵͳ����ϵͳ�ʺ��ƶ������˵����Ҫ��ϵͳ�ṩ������������ϵͳ�������̣�����˿���Ч�ʡ�����ʵ�ʵ������У�ϵͳ��ȫ���Դﵽ���Ҫ��������̽�����顢ͼ��ɼ���Ŀ�궨λ������ͨ�ŵ�����
���Ĺؼ��֣������� ����ϵͳ ������-���ܳ�������֪ʶ���� - ������-���ܳ�
��һƪ������ң��������ģ�͵İ�װ�����






