内容摘要:利用ZigBee通信协议栈和可编程片上系统(System On a Programmable Chip,SOPC)技术,实现了两个三维移动天线平台的协调动作与综合控制。通过设计符合Avalon总线标准的自定义步进电机控制模块,减小了步进电机控制的软件开销。使用激光测距传感器,实现三维移动平台的精确定位。构建了基于ZigBee技术的分布式无线通信网络。结合μC/OS—II实时操作系统,增强了多任务的实时性。系统具有集成度高、可扩展性强、可靠性高和控制精度高的特点。
关键词:可编程片上系统;无线通信技术;自定义IP核;嵌入式操作系统;激光测距传感器
引言
高精度的三维移动天线平台在许多测试测量场合得到广泛应用。然而,现有的高精度天线平台大多为单一平台,本文提出了一种多平台组合控制、协调工作的解决办法。
1 系统组成
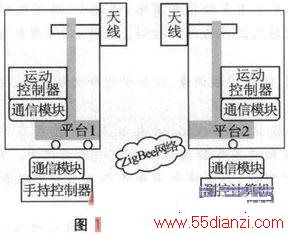
三维移动天线平台系统按照功能划分,主要由测控系统、通信网络、运动执行机构组成,如图1所示。其中,测控系统由测控计算机、手持控制器组成;通信网络采用ZigBee无线通信网络;运动执行机构由两个差动转速轮式移动平台搭载高精度天线桅杆构成。运动执行机构装有两个ELDS—C高精度激光测距传感器(测距范围0.05~30 m、精度±3 mm)及用于移动平台初始对准的一字激光发射器和接收器。
2 运动执行系统设计
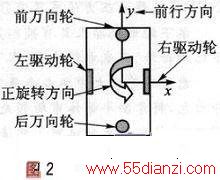
2.1 运动执行机构坐标定义
为了确定运动执行机构的移动方向与坐标,定义天线移动平台坐标系,如图2所示。以两水平移动控制电机同步正转行进方向为y正方向,以从x轴方向向y轴方向旋转为平台旋转正方向(对应旋转控制电机正转),天线向上升高方向为z正方向(对应升降控制电机正转)。
2.2 运动控制器硬件设计
运动控制器在水平移动控制电机、天线升降移动控制电机、天线旋转极化控制电机以及激光测距传感器等部件的支持下完成天线位置与姿态的测量与控制。运动控制器分为主控板和接口板两部分。
2.2.1 主控板
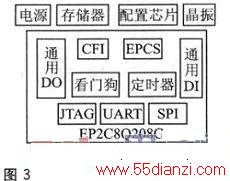
运动控制器主控板由处理器单元(Nios II软核)、存储器、JTAG调试接口等组成,它具有通用的DI、DO、RS232等接口。
核心芯片选用Atera公司的Cyclone II系列FPGA芯片EP2C8Q208C。ALTEra Cyclone II采用全铜层、1.2 VSRAM工艺设计,Cyclone II器件提供了4 608到68 416个逻辑单元(LE),并具有一整套最佳的功能,包括嵌入式18位×18位乘法器、专用外部存储器接口电路、4 Kb嵌入式存储器块、锁相环(PLL)和高速差分I/O能力。主控板组成框图如图3所示。
2.2.2 接口板
接口板是针对测控对象的测控需求与电气接口特点设计的,它将主控板的通用电接口转换为测控专用接口,包括水平运动控制接口电路、垂直升降运动控制接口电路、旋转极化控制接口电路、初始对准辅助设备接口电路、系统状态灯驱动电路等,其组成与连接关系如图4所示。
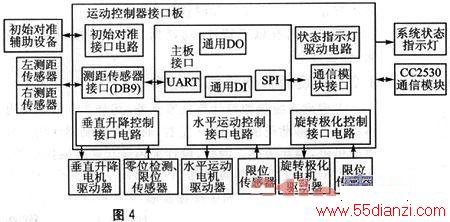
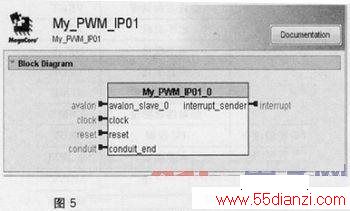
步进电机控制接口部分充分利用Nios II软核的高度可制定性,自定义设计了一个符合Avalon总线标准的步进电机控制IP核。该IP核可以像操作标准外设一样读写相应寄存器,实现具体的控制。其寄存器映射如表1所列。其中,period寄存器值对应电机运行速度,number寄存器对应电机运行距离。

图5为QUARTus II软件生成的步进电机控制IP核的从外设框图。
2.3 运动控制器软件设计
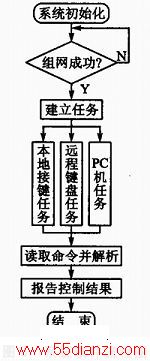
由于运动控制器需要完成本地按键任务、远程键盘任务、PC机任务,其中PC机任务又分为平台水平初始对准任务、天线垂直调零任务、天线极化调零任务、运动任务等,因此运动控制器软件系统使用μC/OS—II实时操作系统完成任务的调度和处理。
系统上电完成必要设备初始化之后,控制通信模块上电,完成无线组网功能。操作系统创建本地按键任务、远程键盘任务和PC机任务。本地按键任务由外部中断触发Key_Sem信号量控制执行。远程键盘任务和PC机任务由通信模块控制执行。按键命令格式:KEY:key_value:YEK(12字节),按键命令取值如表2所列。

计算机命令取值如表3所列,计算机命令格式如下:
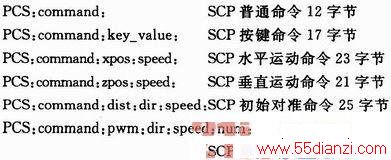

系统命令可划分为简单非定量命令(前进、后退等),复杂非定量命令(水平对准、垂直调零等)和定量命令(水平运动、垂直运动)3种。其中简单非定量命令在相应任务中获取解析后直接读/写步进电机控制模块寄存器完成控制。而接到复杂非定量命令后,根据命令取值建立不同的任务,在新建任务完成相应操作后向命令发送方回复应答数据,并删除自身,等待下一次命令再次新建该任务。定量命令包括坐标值命令(水平命令、垂直命令)和寄存器值命令(单步命令)。单步命令中包含相应电机控制寄存器值(即包含速度、距离、方向控制信息),相应任务直接提取数据完成电机控制。坐标值命令包含预定目标x、y坐标值,系统根据自身坐标(当前传感器值)计算得出电机控制寄存器值完成动作。系统软件流程图如图6所示。
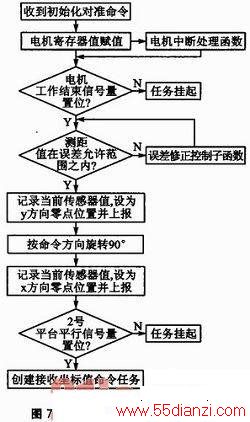
系统子任务中,水平初始对准任务和天线垂直调零任务最为重要。它不仅是移动平台位置初始化过程,更是系统建立空间坐标系的基础。因此,该任务实现的好坏,直接影响移动平台控制的可靠性。设计完善的应答机制,合理地使用信号量、标志组等,是任务设计合理可靠的关键。其简化流程图如图7所示。
3 无线通信设计
3.1 ZigBee技术简介
ZigBee技术是一种应用于短距离、低传输数据速率下的各种电子设备之间的无线通信技术。我国目前可以使用的ISM(Industrial,Scien tifIC and MeDICal)频带为433MHz和2.4 GHz。ZigBee技术在我国工作在2.4 GHz频段,采用较高阶的QPSK调制技术,可以达到250 kb/s的速率,并减少工作时间,以降低功耗。在MAC层采用CSMA/CA方式,以提高系统兼容性。网络层方面,ZigBee联盟规定可以采用星形和网状拓扑。
ZigBee具有以下特性:功耗低、可靠性高、网络容量大、保密性高。
3.2 无线通信网络拓扑结构
本文关键字:暂无联系方式天线,通信技术 - 天线






