SOPC和ZigBee的三维移动天线平台设计解析
点击数:7490 次 录入时间:03-04 12:01:58 整理:http://www.55dianzi.com 天线
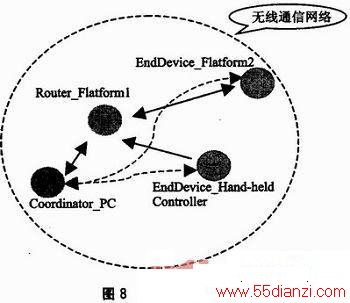
考虑到系统除测控计算机节点外,其余3个节点均为移动节点,移动范围在30 m左右,而手持控制器使用5号电池供电,功耗敏感。因此,设计采用簇状网络拓扑结构。即测控计算机为网络协调器,1号移动天线平台为路由器,2号移动天线平台和手持控制器为终端设备。手持控制器采用低频唤醒机制以延长电池使用寿命。网络拓扑图如图8所示。
结语
针对双三维移动天线平台精确定位与控制,提出了一种切实可行的方案。经过实验验证,移动天线平台行进方向误差5 mm。天线水平极化和垂直极化误差0.2°。系统充分利用了SOPC技术优势,完成了两平台的综合控制和协调工作。证明了系统具有高精度、高可靠性、高集成等特点。
上一页 [1] [2]
本文关键字:暂无联系方式天线,通信技术 - 天线






