Abstract:Decoupling design method of setpoint tracking and disturbance rejection characteristics is proposed for the fuzzy adaptive PID controller of two-degree-of-freedom for typical industrial process control plant。The fuzzy adaptive PID controller for disturbance rejection,Good setpoint tracking can be achieved by adjusting the reference model parameters,The simulation results show that the method compared to other methods of superiority。
Key words:fuzzy PID;decoupling;two-degree-of-freedom
1 引言
在工业过程控制领域,存在许多被控过程的机理比较复杂,系统具有高度非线性、纯滞后、开环不稳定等特点。在负载扰动和一些参数发生变化的情况下,过程的模型参数会发生变化,实际过程系统存在一定的不确定性。面对这种不确定的实际过程采用固定不变的参数显然难以达到令人满意的控制效果,此外PID调解器参数的整定也是通过不断试凑的方法,且不易整定。随着现代控制理论的不断发展和计算机技术的广泛使用,工业过程控制系统的算法如灰色预测算法、神经网络控制、模糊自适应控制相继涌现,以满足高性能系统的要求。文[1][2]将二自由度控制方法与模糊控制方法结合起来,用于交流系统的速度控制和伺服系统的位置控制上,为了提高系统的鲁棒性,获得更好的目标值跟踪响应,文[1]提出在二自由度控制系统的基础上,在前向通道中引入系统参考模型,在反馈通道中引入模糊控制器,即构成一种模糊自适应机构,并通过它实现在线调节,文[2]就速度控制器而言提出一种模糊二自由度控制器设计方法,该方法中应用到两个模糊控制器,分别用来实现设定值跟踪特性和干扰抑制特性。文[3]提出了一种二自由度内模控制方法,该方法具有一定的鲁棒性能,但是响应速度较慢且超调较大。文[4]提出一种二自由度PID参数整定方法但该方法需整定参数较多且不易整定。文[5]提出一种基于模糊推理的PI控制器的参数整定方法,但该方法是一种一由度控制,不能同时兼顾设定值跟随性能和干扰抑制性能。本文在文[1]的基础上提出一种完全解耦的二自由度PID控制器,该系统采用模糊自适应PID控制器实现系统扰动抑制,通过调节参考模型滤波参数可以实现设定值跟踪控制。该方法的主要设计思想为:在标称情况下,根据系统期望的跟踪性能和干扰性能的要求设计二自由度控制器,使系统的闭环传递函数为一设定的参考模型,通过调节该模型参数就可以使得系统获得良好的设定值跟随特性。同时将模糊自适应PID控制器加入到二自由度控制系统中,该控制器用以抑制干扰,以减少由参数变化而给系统性能带来的影响。其具体工作原理是:在标称的情况下,模型跟踪准确且模糊PID控制器不起作用,但当被控制对象的参数发生变化或有扰动存在时,模糊控制器将会自动产生一自适应信号对系统进行补偿,从而提高系统的鲁棒性。采用此方法所设计的二自由度控制器,在模糊控制器的设计上不需数学推导,所以比常规控制器较容易实现,同时采用这种方法可以提高系统的鲁棒性。
2 二自由度PID控制系统设计
2.1 改进结构的二自由度控制
本文针对具有时滞的一阶惯性过程提出一种新的二自由度控制结构如图1所示。
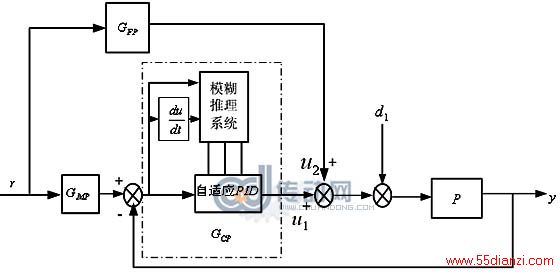
图1改变结构的二自由度控制结构图
图中r为给定值,y为系统输出,d1为干扰信号,P为过程对象,GMP为设定值跟随特性的参考模型,GGP为模糊自适应PID控制器。GFP为系统的前馈控制器。在这种二自由度控制结构中,GMP的作用是调节系统的设定值跟随特性,GCP模糊控制器的作用是抑制干扰并保证系统有较好的鲁棒稳定。
2.2 模糊自适应PID控制器设计
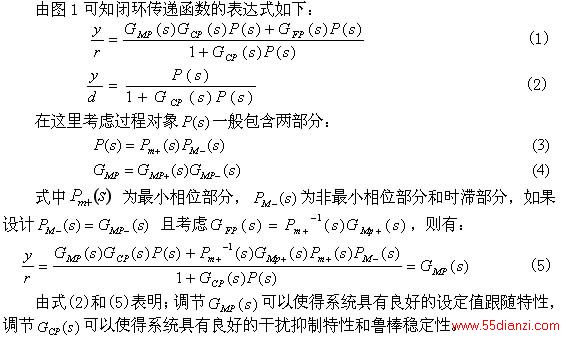
模糊自适应PID控制器机构图如下所示:
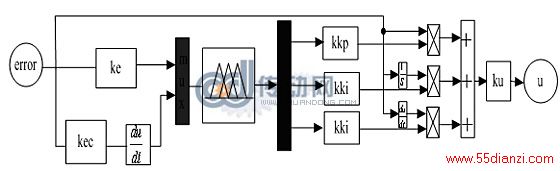
图2 模糊自适应PID控制器
由式(2)可知系统的干扰抑制性能的好坏可以通过设计GCP(s)来得到,由于模糊控制优于传统控制的一个重要方面是能将人的经验以规则的形式融入到控制过程中去,不需知道被控对象精确模型,采用模糊控制方法来设计系统,可以比较容易地获得理想的效果。图1中GCP(s)为模糊自适应PID控制器。在图2中,E、EC分别为误差e、误差变化de/dt的模糊语言变量,Ke、Kec为误差和误差变化率的量化因子,Kp、Ki、Kd的量化因子分别为KKp、KKi、KKd输出变量u的量化因子为Ku,语言变量的模糊集如下所示:
E={NB,NM,NS,ZO,PS,PM,PB}
EC={NB,NM,NS,ZO,PS,PM,PB}
Kp={ZO,PS,PM,PB}
Ki={ZO,PS,PM,PB}
KKd={ZO,PS,PM,PB}
它们分别代表{负大,负中,负小,零,正小,正中,正大},各语言变对应的隶属度函数曲线如下所示.
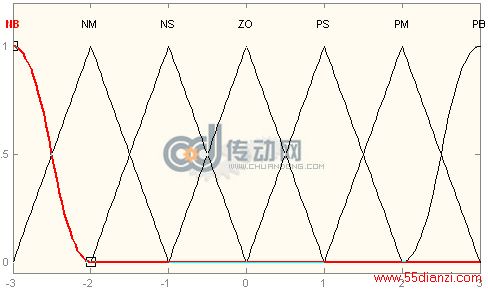
图3 误差和误差变化率的隶属度函数曲线
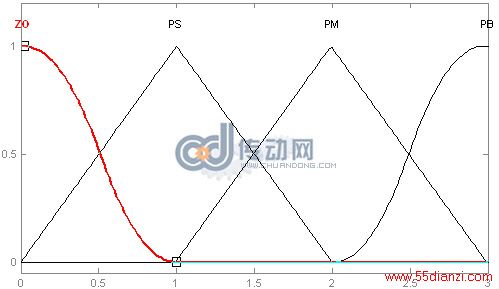
图4 输出变量比例积分微分的隶属度函数曲线
E、EC模糊变量论域皆为[-3,3],Kp、Ki、Kd的模糊论域分别为[0,3]。E、EC、Kp、Ki、Kd的隶属函数为高斯类型和三角形相结合。解模糊化方法采用中位数法。规则是模糊控制器的核心,规则太多,在线推理时间过长,很难保证控制的实时性;规则太少又无法获得控制效果。规则的制定以人的直观经验为基础,PI参数模糊自整定是找出PID三个参数与误差e和误差变化率de/dt之间的模糊关系,在运行中通过不断检测e和de/dt,根据模糊控制原理对3个参数进行在线修改,以满足不同的e和de/dt对控制参数的不同要求,而使被控对象具有良好的动、静态性能。大误差时应使系统迅速响应,小误差时应防止超调量过大。模糊控制规则用以下形式来描述:
If {E=Ai and EC=Bi} then Kp=Ci, Ki=Di,Kd=Ei i=1,2……n
其中Ai、Bi、Ci、Di、Ei为各自论域上的模糊语言值,其模糊控制规则表如表1、2所示。

表1 Kp的模糊规则表

表2 Ki的模糊规则表

表3 Kd的模糊规则表






