智能车控制是涵盖自动控制、模式识别、传感技术、计算机、机械与汽车等多个学科的复杂系统。为了实现对其很好的控制,文章提出了基于模糊控制的电磁引导的智能车控制方案。实际结果表明智能车运行性能优良。
智能车涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多个学科专业,十分复杂。传统的控制理论对于复杂或难以精确描述的系统,则显得无能为力了。模糊控制是利用模糊数学,可以有效地利用专家知识,适用于许多复杂系统。因此提出了基于模糊控制的电磁智能车设计。
1 系统总体方案及车模各项参数
1.1 系统总体方案
智能车系统由车前桥的电磁传感器单元、舵机单元、转向机构,负责路径检测以及转向工作。后桥的光电编码器、电机、制动装置以及Freescale的MC9S12XS128主控单元构成,负责电机速度控制,主控单元负责赛道数据处理以及控制策略的实施。此外增加无线单元对智能车的实时数据进行监控,以对模糊控制规则进行优化。智能车系统结构关系如图1所示:
1.2 系统的硬件参数
智能车外形参数:车长39cm,车宽17cm,车高13cm,车重约1.0kg。
2 硬件电路设计
2.1 主控单元的设计
主控单元采用Freescale MC9S12XS128,主频40MHz,FlashRom128kB,具备SPI、SCI、IIC等常用接口。
2.2 光电编码器的选取与安装
旋转编码器,线数越高,测速精度就越高,但是体积就越大,最终选用了200线的编码器E6A2-CS3E。将编码器安装在后轮传动齿轮上既可以保证其运转的稳定性,又降低了整车的重心,其具体安装如图3所示。

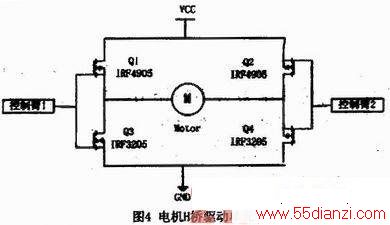
2.3 电机驱动单元
电机驱动单元由H桥电路组成,H桥具有工作电压范围大,导通电阻小,导通电流大的优点,其结构如图4所示。
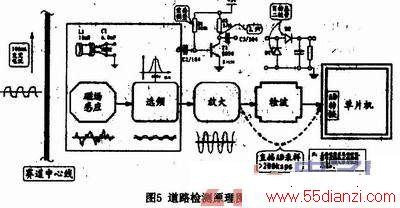
2.4 电磁传感器电路
电磁智能车的路径引导线为通有20kHz、100mA电流的漆包线(线径0.1~0.3mm)。如何将引导线产生的电磁波能量转换为电压信号供AD采样成了智能车传感器中最为关键的部分,道路检测原理如图5所示。
智能车采用双排八电感的传感器排布方案,每排四个电感,分前后两排。
3 控制算法的设计
3.1 舵机控制算法
舵机作为车的方向控制结构,其控制算法直接影响到车的整体质量,如果舵机的控制算法不好,会导致舵机转角不平滑,过弯时多次转弯,使车速在弯道时大大地减小,因此,使舵机平滑及时地过渡是舵机控制算法的主要目的。
舵机的控制采用经典的PID控制,各环节的具体参数要经过反复的调整,以达到对各种赛道类型的适应性的平衡。
3.2 电机速度模糊控制算法
3.2.1 模糊控制
模糊控制是以专家的经验为基础实施的一种智能控制,不需要精确的数学模型。模糊控制器的设计主要考虑以下几项主要内容:1)确定模糊控制器的输入变量和输出变量(即控制量)。2)设计模糊控制器的控制规则。3)确立模糊化和解模糊的方法。4)选择模糊控制器的输入变量及输出变量的论域,并确定模糊控制器的参数(如量化因子、比例因子等)。5)编制模糊控制算法的应用程序。
3.2.2 模糊控制器的设计
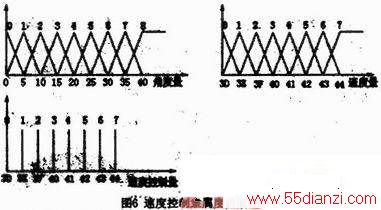
速度控制器的输入量为角度量和速度量,输出的为控制电机速度的PWM波占空比。
将智能车转角的大小分为9种情况。而对智能车的速度,根据跑道的情况,在转弯的最小速度值到直道上的最大速度值之间分为8种情况。它们的模糊化采用三角形隶属度函数,输出的隶属度函数采用单点值,如图6所示。
根据车体的运动学规律,为了使车行驶的平均速度最大且不偏离车道,总结出模糊控制规律如下:
(1)如果智能车在直道上,智能车以高速行驶,并且导线在智能车的正中,则以智能车的最高速度行驶。
(2)如果智能车要进入弯道,则要减速,如果已经进入弯道,则要加速,以使得驶出弯道进入直道时加速更加迅速。
(3)如果智能车以高速驶入弯道,则要刹车,以免冲出跑道。
基于上述经验,得出的模糊控制规则如表1所示。

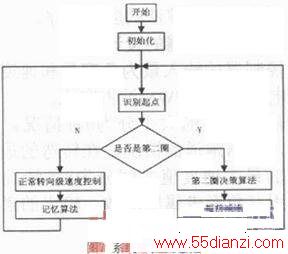
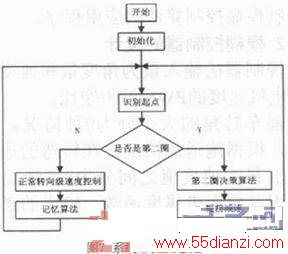
3.3 系统控制总体流程图
智能车的控制软件采用单元化的程序结构,流程图如图7所示。
4 调试
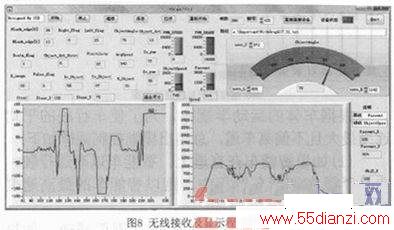
在调试阶段,利用Labview开发了智能车实时 监控系统,该系统主要完成将智能车行驶过程中的各种状态信息(如电磁传感器数值、车速、舵机转角、电池电量等)实时的以无线串行通信方式发送至上位机处理,方便及时调整各个参数。
5 总结
通过模糊算法的运用,实现了智能车的动态平衡,使智能车能够很好地完成赛道。
本文关键字:智能 机器人-智能车,电子知识资料 - 机器人-智能车






