基于模糊神经网络的移动机器人沿墙导航控制
点击数:7328 次 录入时间:03-04 11:49:50 整理:http://www.55dianzi.com 机器人-智能车
1 引言
沿墙导航控制问题是指驱动机器人在一定方向上沿墙运动,或者更一般意义上的沿着物体轮廓运动,并与墙保持一定距离。它可以看作是移动机器人智能的低层行为,当与其它高层的智能行为相结合时,可以完成复杂的任务。墙体情况可分为以下几种:
跟踪一个未知的墙体。当获得的环境信息太少或无法获得,机器人的轨迹可能会特定为“沿着右边的墙体运动直到发现第一个门口”。另外,如果移动机器人的任务是绘制全局模型,它就必须沿墙体行进将地图描述完全。
跟踪一个已知墙体。机器人按照规划好路径跟踪轨迹,为了使算法误差保持在小范围内而跟踪墙体。或者,路经规划中包括已知墙体,需要机器人沿墙行进完成特殊的任务。
目前关于移动机器人沿墙导航控制已有较多研究,大多采用声纳传感器作为环境的感知设备。算法应用则从早期的航迹推算法,发展到后来使用卡尔曼滤波,模糊控制,神经网络控制等。由于模糊逻辑技术和神经网络技术各自独到的特点,将模糊技术和神经网络有机结合组成模糊神经网络控制系统,可实现模糊规则自动提取、模糊隶属函数的自动生成及在线调节。因此本文采用模糊神经网络算法实现移动机器人的沿墙导航控制。
2 模糊神经网络结构
2.1 输入输出值模糊化
本文研究的移动机器人沿墙导航控制融合机器人声纳检测采集到的数据,判断机器人的位姿,然后通过模糊神经网络算法控制移动机器人的动作,使其在一定距离内沿墙体运。文中移动机器人侧壁上方安装有16个声纳,按顺时针排列从0#到15#。
移动机器人要避免与墙体碰撞又要保持一定距离,所以本文为每个声纳设置一个阈值,当声纳检测到的距离值大于或小于这个阈值就采取相应的动作。这样,将声纳采集的距离值与各自相应的阈值相减得到差值△di(i=O,1,2,…,15)作为模糊神经网络的一个输入;移动机器人的角度信息θ作为另外一个输入。将距离差值△di和角度θ输入模糊化如下:
距离差值△di:较小(NB),小(NS),中(Z),大(PS),较大(PB)。
角度θ:左(L),偏左(LS),正(Z),偏右(RS),右(R)。
输出变量为移动机器人的左右轮速Vl、Vr,模糊化如下:
左右轮速Vl、Vr:左转(TL),前进(G),右转(TR)。
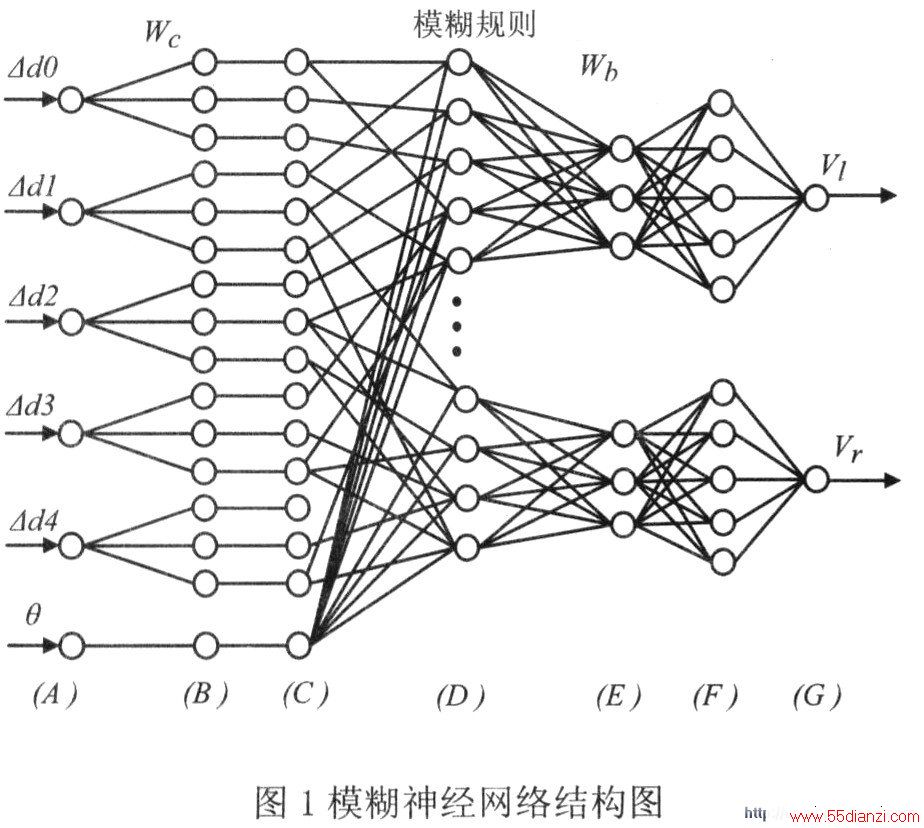
2.2 模糊神经网络结构图
模糊神经网络结构图如图1所示,A为输入层,输入变量分别是前面所说的距离差值△di(i=0,l,2,3,4)和角度θ。A层的作用是将输入值传送到下一层。
本文关键字:机器人 网络 机器人-智能车,电子知识资料 - 机器人-智能车






