 ,取λ=10;采用模糊自适应PID控制进行阶跃响应,设定值为1时对文[5]方法和本文方法进行对比分析,在线设置比例因子KE=2,KEC=1,KKp=0.5,KKi=0.028。输出比例因子Ku=0.168。在控制器输出加入-0.2的干扰,相应曲线如下图所示:
,取λ=10;采用模糊自适应PID控制进行阶跃响应,设定值为1时对文[5]方法和本文方法进行对比分析,在线设置比例因子KE=2,KEC=1,KKp=0.5,KKi=0.028。输出比例因子Ku=0.168。在控制器输出加入-0.2的干扰,相应曲线如下图所示: 
图5模型精确时响应曲线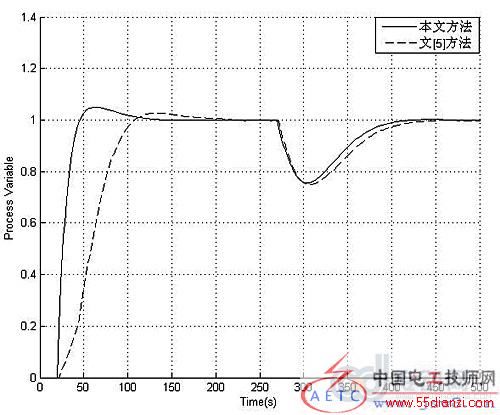
图6模型失配10%时的响应曲线
从上图中可以看出,在标称的情况下本文方法的设定值跟随性能明显优于文[5]的方法。对于干扰抑制特性,本文的方法优于文[5],在模型失配时本文方法的鲁棒性优于文[5]。
四、结论
由图5和图6知文[5]和本文都具有具有较好的干扰抑制特性,但是文[5]方法的系统设定值跟随性能不理想。在此基础上提出了将干扰抑制特性和设定值跟随特性解耦的二自由度模糊PID控制方法,该方法在文[5]的PID控制器的基础上对其结构和模糊规则进行了改进,这种结构可以通过调节参数 可以获得良好的设定值跟踪特性,通过设计模糊自适应PID控制器可以对系统的干扰进行有效抑制。该方法实现简单,方便易用,对实际控制有重要的指导意义。同时,利用模糊逻辑工具箱设计的模糊控制器,能方便地修改输入输出的论域、隶属度函数及控制规则,而且仿真时间比较快,仿真结果表明了该方法的优越性。
参考文献:
[1] C.M.Liaw,F.J.Lin,POSTTTION control with fuzzy adaption for induction servomotor driver,IEE Pro.-Electr.Power,1995,Vol.142.No.6,397-404
[2] C.M.Liaw,S.Y.Cheng,Fuzzy Two-Degree-of-freedom Speed Controller for Motor Driver,IEEE Transcation on Electronics,1995,Vol.42,No.2,209-216
[3] 张井岗, 李临生, 陈志梅. 二自由度PID调节器的内模整定方法[J].仪器仪表学报,2002,231.ZHANG Jinggang,LI Linsheng,CHEN Zhimei.IMC tuning of two-degree-of-freedom PID regulator[J].Chinese Journal of Scientific Instrument, 2002,23(1),28-30.
[4] ARA KI M,HIDEFUMI T.Two-degree-of-freedom PID controllers[J].International Journal of Control,Automation,and Systems,2003,1(4):401-410.
[5] 刘敬, 吕立华. 基于模糊推理的PI控制器参数整定方法.控制工程,1671-7848(2007)
作者简介:
赵闰华(1980- ) ,男,硕士研究生,主要从事先进过程控制。
E-mail:zrh2008929000@163.com
联系地址是:太原科技大学468信箱 邮编030024 联系电话13453177803






