引言
电机是现代工业的“肌肉”,推动着工业的发展。步进电机是电机家族的“婴儿”,在20世纪60年代早期才开始流行。它能将电脉冲信号转换为角位移、直线位移等诸多优点,被构想作为昂贵的位置控制应用中伺服电机的低成本替代产品,在航空航天、精密机械加工、自动化控制和办公室自动化设备等领域大量使用,如云台、打印机、绘图仪和雕刻机等。
一般的步进电机因为受限于机械加工工艺,其步距角不能做到很小(如现在相数高的5相步进电机步距角为0.72)还达不到对位移精度要求高的精密控制系统的要求,如精密仪器定位、数控加工等场合。另外,使用传统的驱动方法,步进电机还存在低速运行时振动,会产生共振和噪声的固有特性。
采用细分驱动不仅能有效解决这些问题,改善步进电机的运行性能,还提高了分辨率,增加了电机的输出力矩。1975年美国学者T.R.Fredriksen首次在美国增量运动控制系统及器件年会上提出了步进电机步距角细分的控制方法后,在国内外被广泛研究,成为步进电机驱动的发展趋势。一些高性能的细分驱动器在国外被研究出来,但技术极为保密。国内外对步进电机细分驱动研究的文献很多,主要对细分数、均匀步距、恒定转矩、低噪音、低振动、抗干扰、细分驱动器的硬件实现等方面进行研究。
文章下面部分对步进电机的工作原理及细分驱动进行原理详细介绍,提出一种用PSoC设计的细分驱动器,并总结了相对于其它一些设计方案的特点。
步进电机工作原理及细分驱动
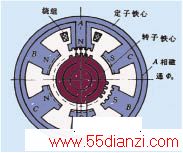
图1是某两型步进电机的内部与外形结构,从图中可以大致看出其组成结构。图2是三相混合式步进电机的结构示意图,定子绕组磁极和转子上都有小齿,一般分别是5个和50个,当某一相绕组通电时,转子上的小齿就会与相应绕组上的小齿对齐,与另外两绕组上的小齿错开一定的角度。
 图1 步进电机内部和外形结构
图1 步进电机内部和外形结构
 进行计算,式中左边为步距角,右边m为定子的相数、Z为转子的齿数、C为通电方式(单双相轮流通电时C=2,其它两种C=1)。那么可以计算出三相步进电机的步距角为。
进行计算,式中左边为步距角,右边m为定子的相数、Z为转子的齿数、C为通电方式(单双相轮流通电时C=2,其它两种C=1)。那么可以计算出三相步进电机的步距角为。

由此可得出如下一些结论:①控制步进电机各相定子绕组的通电顺序可以控制步进电机的转动方向;②控制输入给步进电机的脉冲数目N可以控制步进电机的角位移为 ;③控制输入给步进电机的脉冲的频率可以控制步进电机的转速为:
;③控制输入给步进电机的脉冲的频率可以控制步进电机的转速为:
 (转/分钟)
(转/分钟)
其实,仔细分析三种通电方式,应该不难发现蕴含于其中的细分原理。以单双相轮流通电A→AB为例,如果在这个阶段,我们使B相绕组中的电流慢慢增加到与A相绕组中电流相同,那么与A相绕组对齐的转子就会慢慢转到A与B相绕中间;再假设我们使B相绕组中的电流以定量大小增加,即一种阶梯上升的电流,那么转子就会以比0.6更小的步距角一步一步转动,这样的就实现了步距角的细分。
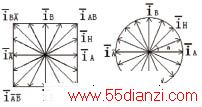
但这是一种只改变某一相绕组中电流大小的细分方法,以二相步进电机为例,其A、B两相绕组中的电流合成矢量理论上是如图3左所示的形式;其相邻两次电流矢量的大小与夹角都不同,这直接导致步距角与输出力矩的大小不均匀。而现在所用的细分方法,一般是如图3右所示的均匀恒幅电流矢量法;要实现电流矢量的这种变化,需A、B两相中的电流同时改变,且满足iA=iH.cos(a),iB=iH.sin(a)。
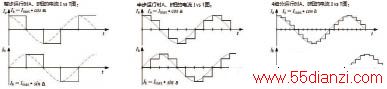
下面分析一下两相步进电机中每相绕组中的电流,图4、5、6分别是整步(单相轮流通电)、半步和四细分运行时绕组中电流波形示意图。分析可知,细分原理就是通过精确控制相电流来产生均匀旋转的磁场,即把原来每相电流的矩形波变为阶梯波,原来走一步只给一个矩形波,现在把一个步距角分为N步来走,给N个阶梯的阶梯波,N就是细分数。细分数越大,相电流相邻两次的变化就越小,步距角就越小,为原来固有步距角的1/N,电机运行性能更好。还可得出另外两点结论:①进给绕组的细分电流的阶梯数量m控制电机转动的角位移为;②细分电流大小变化的频率控制电机的转速。
细分驱动的实现主要靠D/A数模转换器来精确控制每小步的相电流,用8位的D/A最大能实现256级细分,位数越多,细分数越大。要用D/A输出的正弦规律变化的电流或电压信号来控制相电流,根据末级功放管的工作状态可以分为放大型和开关型两种。一般步进电机的工作电压是几伏到四十几伏,工作电流是几百毫安到几安,从而不能用D/A的输出直接驱动。
放大型驱动电路就是让功放管工作在放大状态来放大D/A的输出,可以进行电压放大也可以进行电流放大,但用放大后的正弦规律变化的电压加在绕组上,会由于绕组电感的作用而不会产生正弦规律变化的电流,所以一般应进行电流放大。这种驱动方式,电路较简单,只要选择精度高一点的电子元件,电流的控制精度也较高;但由于功放管工作在放大状态,功耗较大、发热较严重,所以一般用在驱动电流较小、控制精度较高、散热环境较好的场合。
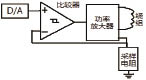
开关型驱动电路就是让功放管工作在开关状态,从而其功耗和发热都会降低;但电路较复杂,输出的电流会像如图7所示有一定的波纹;因此一般用于驱动力矩较大的电机。随着大力矩输出的步进电机的发展,这种电路很常见,并且许多日本公司还生产了这种电路的步进电机细分驱动芯片,如TA8435、A3955SB、THB8128等。
要实现开关型电路,常用的有两种方法:斩波式和脉宽调制式(PWM)。斩波式电路典型结构如图8所示,其原理是用采样电阻对电机绕组中的电流进行采样,使之与D/A输出的细分电压进行比较,若采样值大于D/A输出,则功放管截止,反之功放管导通。这样D/A输出正弦规律变化的阶梯型控制电压,绕组中就流过阶梯型的电流,这也是电流会有波纹的原因。这种电路应该选用开关性能比较好的功放管和比较器。