传统的鼠笼式异步电动机起、制动控制方式一般有四种,即定子回路串电阻起动,Y/△起动,自耦变压器起动和延边三角形起动;制动方式有三种,反接制动,能耗制动和电容制动,其中任何一种起、制动控制方式的实现通常由继电器-接触器控制系统来完成。下面就以定子回路串电阻降压起动和反接制动为例,分析由继电器-接触器实现的鼠笼式异步电动机的起、制动控制。
点击此处查看全部新闻图片
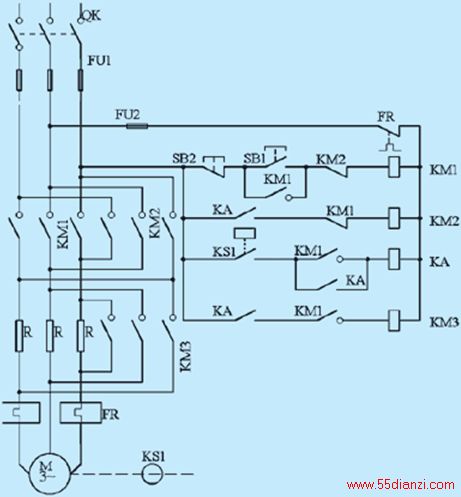
图1继电器接触器控制系统
如图1所示,此控制电路含三个接触器和一个中间继电器线圈,12个触点。起动时,KM2、KM3线圈均处于断开状态,按下起动按钮SB1,KM1线圈通电并自锁,电动机串电阻减压起动。当电动机转速上升到某一定值时(此值为速度继电器KS1的整定值,可调节,如调至100r/min时动作),速度继电器KS1的常开触点闭和,中间继电器KA通电并自锁,KA的常开触点接通接触器线圈KM3,KM3的主触点在主电路中短接定子电阻R,电动机转速上升至给定值时投入稳定运行。
制动时,按下停机按钮SB2,KM1线圈断电,其主触点断开三相电源;控制电路中常开触点断开,KM3失电,限流电阻串入;常闭触点闭合,接通反接制动接触器KM2,对调两相电源相序,电动机处于反接制动状态。当转速下降至某一定值时(比如100r/min),KS1常开触点断开KA,继而断开KM2,电动机失电,迅速停机。
这种传统的继电器接触器控制方式控制逻辑清晰,采用机电合一的组合方式便于普通机类或电类技术人员维修,但由于使用的电气元件体积大、触点多、故障率大,因此,运行的可靠性较低。随着PLC技术的发展,使用PLC进行电机的运行控制已成为必然趋势。
本文关键字:电动机 PLC改造,plc技术 - PLC改造






