可编程序控制器是在继电器控制和计算机控制的基础上开发的产品,自60年代末,美国首先研制和使用可编程控制器以后,世界各国特别是日本和联邦德国也相继开发了各自的PLC(programmablelogiccontroller),因此,与传统的继电器接触器控制系统相比较,笔者认为采用PLC实现鼠笼式异步电动机起制动控制是最明智的选择。下面就是笔者设计的采用PLC实现的鼠笼式异步电动机起制动控制电路的接线图、梯形图和指令程序,如图2和图3所示。
点击此处查看全部新闻图片
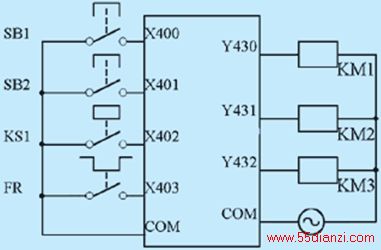
图2PLC控制的输入输出接线图
点击此处查看全部新闻图片
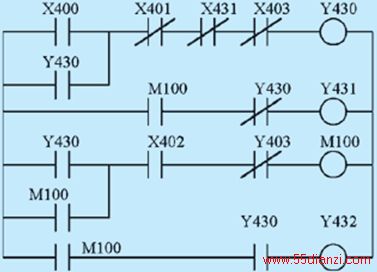
图3PLC控制的梯形图
PLC控制逻辑与传统的继电器接触器控制系统基本一致,其工作过程如下:
起动时,按下起动按钮SB1,X400常开触点闭合,Y430线圈接通并自锁,KM1线圈接通,主触头吸合,电动机串入限流电阻R开始起动,同时Y430的两对常开触点闭合,当电动机转速上升到某一定值时,KS1的常开触点闭合,X402常开触点闭合,M100线圈接通并自锁,M100的一对常开触点接通Y432的线圈,KM3线圈有电主触头吸合,短接起动电阻,电机转速上升至给定值时投入稳定运行。
本文关键字:电动机 PLC改造,plc技术 - PLC改造






