1.PID控制系统的含义与构成
(1)PID调节的含义
PID调节属于闭环控制,是过程控制中应用得十分普遍的一种控制方式。它是使控制系统的被控物理量能够迅速而准确地无限接近予控制目标的一种手段。
在实行PID调节时,必须至少有两种控制信号:
①目标信号。
通常也称为给定信号,是与被控物理量的控制目标对应的信号,用XT表示。
②反馈信号。
是通过传感器测得的与被控物理量的实际值对应的信号,用XF表示。
PID调节功能将随时对XT与XF进行比较,以判断是否已经达到预定的控制目的。具体地说,它将根据两者的差值(XT-XF),利用比例(P)、积分(I)、微分(D)的手段对被控物理量进行调整,直至反馈信号与目标信号基本相等(XT一XF),达到预定的控制目标为止。
(2)PID控制系统的构成
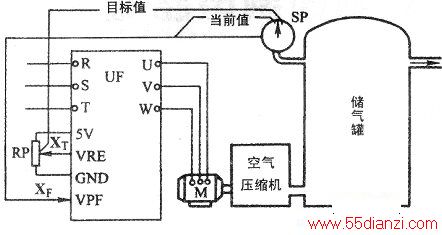
以某空气压缩机的恒压控制系统为例进行说明。
如下图所示。其基本控制过程是:电动机拖动空气压缩机旋转,使之产生压缩空气,并储存于储气罐中。储气罐中空气压力的大小取决于空气压缩机产生压缩空气的能力(在本系统中,就是取决于电动机的转速,2nM)和用户用气量之间的平衡状况。
为了满足用户对气压的需要,保证供气质量,要求通过变频器及其PID调节功能使储气罐的空气压力保持恒定。具体地说:当用户的用气量增大,使储气罐的空气压力下降时,变频器应立即提高输出频率,使电动机加速,以增大空气压缩机产生压缩空气的能力,保持储气罐的空气压力恒定。
反之,当用户的用气量减小,使储气罐的空气压力上升时,变频器应立即降低输出频率,使电动机减速,以减小空气压缩机产生压缩空气的能力,保持储气罐的空气压力恒定。
储气罐内压力的大小由压力传感器SP进行测量。
所以,在恒定控制系统中,SP的输出信号XF应该始终无限接近于目标信号XT。
2.P(比例)、I(积分)、D(微分)的控制作用
(1)比例控制
①恒定控制的基本工作过程
如上述,变频器输出频率fx的大小由XT和XF的比较结果(XT-XF)来决定。
如储气罐压力p超过了目标值,则:
XF>XT→(XT-XF)<0→fx↓→电动机转速nx↓→储气罐压力p↓→直至与所要求的目标压力相符(XF≈XT)为止。
反之,如储气罐压力p低于目标值,则:
XF<Xr→(XT-XF)>0→fx↑→电动机转速nx↑一储气罐压力p↑→直至与所要求的目标压力相符(XF—XT)为止。
②比较增
益为了使储气罐维持一定的压力.将变频器的输出频率及其频率给定信号保持在一定范围内是必要的。令:XG=Kp(XT-XF)式中:XG一频率给定信号。
Kp一放大倍数,也叫比例增益。
就是说,将(XT-XF)放大了KP倍后,再作为频率给定信号,如下图所示。即:
(XT-XF)=XG/KP在这里,KP越大,(XT-XF)则越小,XF越接近于Xr。
这种控制过程,称为比例放大环节。
显然,因为XG不能等于0,所以,XF只能是无限接近于XT,却不能等于XT。这说明,XF和XT之间总会有一个差值,称为静差,用e表示。不消说,静差值应该越小越好。
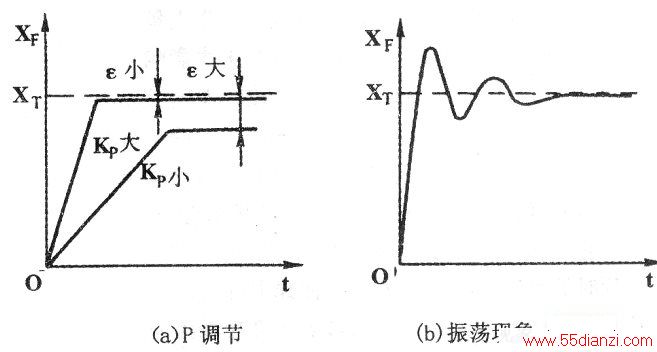
显然,比例增益(Kp)越大,静差(e)越小,如下图(a)所示。
为了减小静差,应尽量增大比例增益,但由于系统有惯性,因此,KP太大了,当XF随着用户用气量的变化而变化时,XG=KP(XT-XF)有可能一下子增大(或减小)了许多,使变频器的输出频率很容易超调(调过了头),于是又反过来调整,引起被控量(压力)忽大忽小,形成振荡,如下图(b)所示。
(2)积分与微分控制
①积分控制
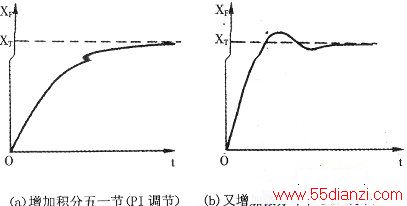
为了消除系统的振荡,引入了积分环节,其目的是:a.使给定信号XG的变化与乘积KP(XT-XF)对时间的积分成正比。意思是说,尽管Kp(XT-XF)一下子增大(或减小)了许多,但XG只能在“积分时间”内逐渐地增大(或减小),从而减缓了XG的变化速度,防止了振荡。积分时间越长,XG的变化越慢。
b.只要偏差不消除(XT-XF≠0),积分就不停止,从而能有效地消除静差,如下图 (a)所示。
但积分时间(I)太长,又会发生当用气量急剧变化时,被控量(压力)难以迅速恢复的情况。
(2)微分控制
微分控制是根据偏差变化率d e /dt的大小,提前给出一个相应的调节动作,从而缩短了调节时间,克服了因积分时间太长而使恢复滞后的缺点,如下图 (b)所示。
本文关键字:暂无联系方式电脑-单片机-自动控制,电子学习 - 基础知识 - 电脑-单片机-自动控制
上一篇:PID的控制信号






