关键词:BP神经网络 GRNN神经网络 PID
1 引言
在工业控制中,传统的PID控制至今仍处于主导地位,尤其适用于能建立数学模型的确定性控制系统。然而大量的工业过程往往具有非线性、时变不确定性等因素,难以建立其精确的数学模型;另外,PID 控制器中的参数通常都由人工整定,由于一次性整定得到的这些参数很难保证其控制效果始终处于最佳状态因此,常规PID 控制器的控制效果和控制精度受到了限制. 神经网络具有自学习、自组织功能和联想记忆、并行处理等优点,使其在复杂的工业控制中得到了广泛应用[1,2]。目前应用较多的神经网络是基于BP 算法的多层前馈神经网络,这种网络反映的是系统静态的输入-输出映射关系。文献[3]提出了一种基于对角回归神经网络(diagonal recurrent neural network,DRNN)的控制系统。与静态网络相比,这种回归网络具有较好的处理动态问题的能力。由于只需较少的神经元和权值,回归网络更适合于处理时变的输入、输出过程[4]。 基于回归神经网络的上述特点,本文采用DRNN网络,设计出比例、积分、微分等参数可以在线学习的PID控制器,并将其应用于日常生活中的供热控制系统中,,建立了一个基于MATLAB环境的控制仿真。
2 基于BP神经网络控制的PID算法
采用多层前向神经网络-BP网络对PID参数kp,ki,kd在线调整,如图1所示。为充分反应输入控制器信号的特性,结合控制器结构,选择网络输入层神经元个数为4,输出层神经元个数为3.输出层神经元的活化函数取:g(x)= 隐层神经元激发函数取函数:f(x)=
隐层神经元激发函数取函数:f(x)= 。网络输入层的输入为:Oj(1)=x(j),1,2,3,4.网络隐层的输入输出为neti(2)(k)=
。网络输入层的输入为:Oj(1)=x(j),1,2,3,4.网络隐层的输入输出为neti(2)(k)= ,…8.式中,wij(2)是隐含层的加权系数;隐含层神经元的活化函数取f(x)=
,…8.式中,wij(2)是隐含层的加权系数;隐含层神经元的活化函数取f(x)= 。网络输出层的输入输出为:netl(3)(k)=
。网络输出层的输入输出为:netl(3)(k)=  式中,wli(3)是输出层加权系数。上述各式中的上标(1)、(2)、(3)分别代表输入层隐含层和输出层。输出层神经元的活化函数取g(x)=
式中,wli(3)是输出层加权系数。上述各式中的上标(1)、(2)、(3)分别代表输入层隐含层和输出层。输出层神经元的活化函数取g(x)= 。性能指标函数为e(k)=1/2error2(k)。按梯度下降法修正网络权系数,并附加一个使搜索快速收敛全局极小的惯性项:
。性能指标函数为e(k)=1/2error2(k)。按梯度下降法修正网络权系数,并附加一个使搜索快速收敛全局极小的惯性项: 为学习速率;为惯性系数
为学习速率;为惯性系数 。由于
。由于 未知,所以近似用符号函数sgn()取代,由此带来的计算不精确的影响可以通过调整学习速率 来补偿。
未知,所以近似用符号函数sgn()取代,由此带来的计算不精确的影响可以通过调整学习速率 来补偿。
由上面的介绍可知PID的增量式方程如下。u (k)=u(k-1)+kp(e(k)-e(k-1))+kie(k)+kd(e(k)-2e(k-1)+e(k-2))由此可得: 。可得网络输出层权的学习算法为:
。可得网络输出层权的学习算法为: ,
, l=1,2,3,4.同理可得隐含层加权系数的学习算法:
l=1,2,3,4.同理可得隐含层加权系数的学习算法:  , i=1,2,...,q.
, i=1,2,...,q.
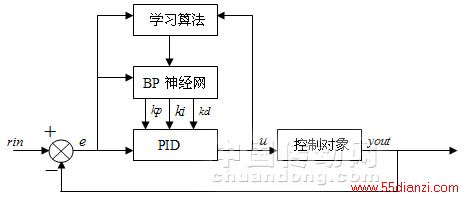
图1 控制系统结构图
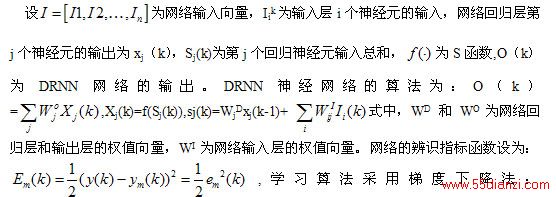
3 DRNN辨识网络
DRNN神经网络是一种回归神经网络。网络结构共三层,隐层为回归层,所以可以对动态系统有很好的辨识。DRNN神经网络的结构如图二所示。
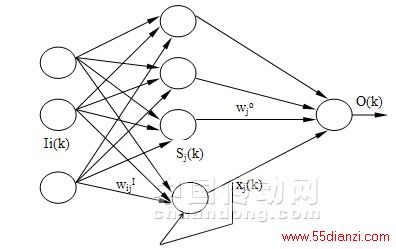
图2 DRNN神经网络结构图

4 基于DRNN辨识的BP神经网络PID算法
基于DRNN辨识的BP神经网络PID控制系统的结构如图3所示。控制器由三个部分组成:(1)经典PID控制器,直接对被控对象过程进行闭环控制,其三个参数kp,ki,kd在线自学习整定。(2)DRNN辨识网络,用于建立被控对象的辨识模型,以便动态观测控制对象的输出对控制输入的灵敏度,提供给BP神经网络。(3)BP神经网络,通过调整自身权系数,对PID控制参数进行调节,以达到某种性能指标的最优。
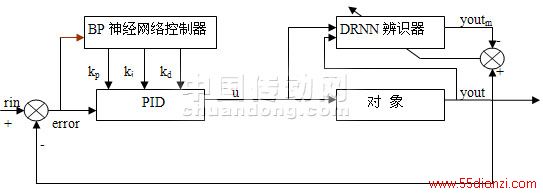
图3 控制系统结构图
基于DRNN辨识的BP神经网络PID控制算法如下:(1)确定BP神经网络结构,并给出个层权系数的初值wij(2)(0)和wli(3)(0)、学习速率η、惯性系数α ;k=1;(2)DRNN网络输入层、回归层、输出层权值赋以小的随机值,并设定网络各层的学习速率和惯性系数;(3)采样得到y(k)、r(k),计算e(k),同时给pj(k)、qij(k)赋零初值;(4)正向计算BP网络各层神经元的输入、输出;计算PID控制器的输出u,并送入控制对象及DRNN辨识网络,产生控制对象的输出yout(k);(5)对DRNN网络的权值进行实时修正,辨识输出ymout(k);(6)用BP网络的迭代算法修正BP网络权系数;(7)令k=k+1返回第一步,继续按步顺序执行。
5 仿真实现
弦波输入响应曲线图,从图中可以看出两条曲线基本重合,误差很小。模型的跟踪能力比较满意,可见,由DRNN神经网络构成的辨识网络收敛速度快,精度高。
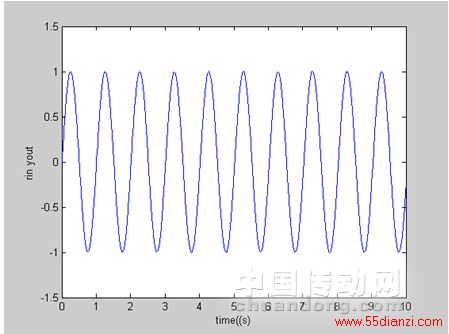
图4 正弦跟踪曲线
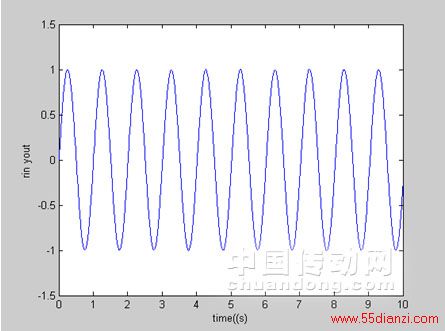
由于集中供热过程中,不可避免的存在不确定性的扰动量,对上述模型添加随机扰动量测试,测试某一时刻系统受到一个外来随机扰动的自适应控制。图5-6为系统突加扰动时的仿真曲线。由图可以看出,在存在某一段时间的扰动误差量的情况下,基于DRNN辨识的BP神经网络PID控制算法仍然显示了很好的控制能力,正弦跟踪曲线基本无变化,显示了对突发动态扰动很好很强的抑制能力。
本文关键字:暂无联系方式电工文摘,电工技术 - 电工文摘






