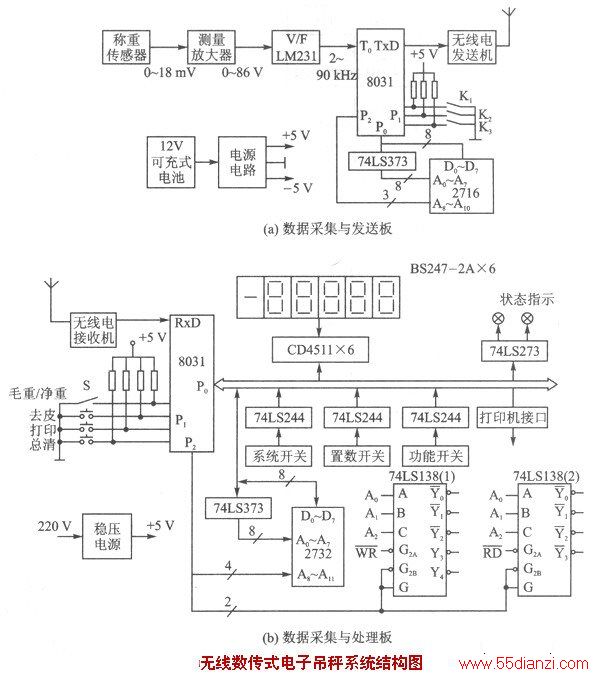
电子吊秤是指被称物处于悬吊状态下进行称量的称重设备。与固定式电子衡相比,电子吊秤除须保证静态精度外,还须考虑动态精度。处于悬吊状态下的被称物,在起吊或受外力作用时会引起摆动,使称重传感器受力随之变动,如对动态称重信号不作适当处理,则称重显示值将不能在规定时间内按精度要求稳定显示读数。吊钩秤体上秤重传感器的输出信号,可按有线或无线传送方式与数据处理装置相联。由于后者移动方便,使用灵活,目前国外普遍采用。下图是我们研制的无线数传式电子吊秤系统结构图。51系列单片机内部的全双工串行通信口、定时器/计数器等功能部件使本系统的硬件电路和软件设计得到简化。
仪器主要技术指标为:
●最大称量:5 t(吨);
●最大分度值:d=2 kg;
●检定分度值:e=4 kg;
●最大允差:±1.Oe;
●工作温度:-10~+40℃;
●读数稳定时间不长于10 s;
●具有去皮、置数、零点自动校正、自检、过载、欠压指示等功能;
●无线电通信距离大于100 m(使用频率及功率符合国家无线电管理委员会规定要求)。
一、摆动信号的极值法处理
被称物在起吊时,由于其重心和吊索支点的连线一般不处于垂直位置,因而引起摆动。摆动产生的误差大大超过允差,因此,必须根据摆动规律建立重量计算公式。
重物摆动时受力情况如图所示。
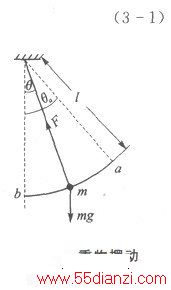
在无阻尼纯摆动时吊索受力:
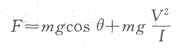
式中:V为线速度。设最大摆角为00,则
![]()
摆动是周期性重复过程,考虑两个极点位置吊索受力大小
如Ra与Fb各减去重量值mg,则可求得吊索受力变化最大幅度
因此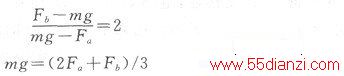
这就是说,在无阻尼纯摆动时,当取得吊索拉力的极大值与极小值时,可按式(3 -2)计算出重量真实值。
实际情况都存在阻尼,因而式(3 -2)只能作近似计算公式。因为只须找近两个极值,所以称重速度快,这对大摆长、小阻尼的情况是有意义的;在阻尼较大时,公式(3 -2)须修正,才能求得较精确的重量值,这须取下一个邻近极大值Fb+1。
![]()
Fa- Fb+l表示吊索拉力在一个摆动周期内摆幅衰减的量值;K取值范围为5.6—5.9,一般取5.7,则被称物在做有阻尼摆动时,重量计算公式为
![]()






