本文介绍的这种简单而又功能强大的漫游机器人的建造方法。可以认为,是建造任何更高级机器人的基础。
你可以在造好的机器人上安一个用直流电控制的真空吸尘器,然后让他在起居室里自由活动。而清洁地毯的实际效果决定于驱动机器人的控制电路或计算机的复杂程度。
你还可以给机器人装上光和声音传感器,给它提供察觉潜在的问题的“眼睛”,有些用于家庭防盗系统中的传感器本来就是做这些工作的,而你的任务只是把他们和机器人的电路连在一起。相似的传感器如果装在你的漫游机器人身上,可以自动地在你的家里、办公室、库房、或其它封闭区域巡视,及早发现火情的光、热和烟。机器人携带的电子驱动的灭火器可以扑灭火灾。
这个漫游机器人只是一个基本模型,本讲座将会告诉你怎样在基本框架上加装更复杂的自动功能。漫游者用到在前几讲中已经讲过的技术,如果你还没有读过,那就先读一下。
制作底座
可用现成的铝型材做漫游机器人的底座,漫游机器人样机用铝支架做底盘,因为铝可以减少机器人的重量,这样大小的机器人没有必要用钢材作底座。
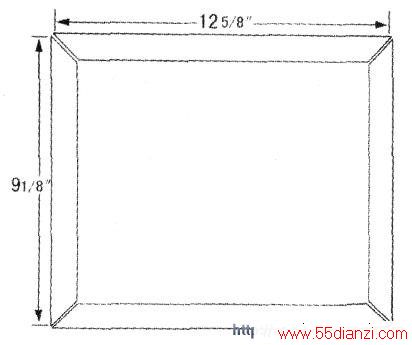
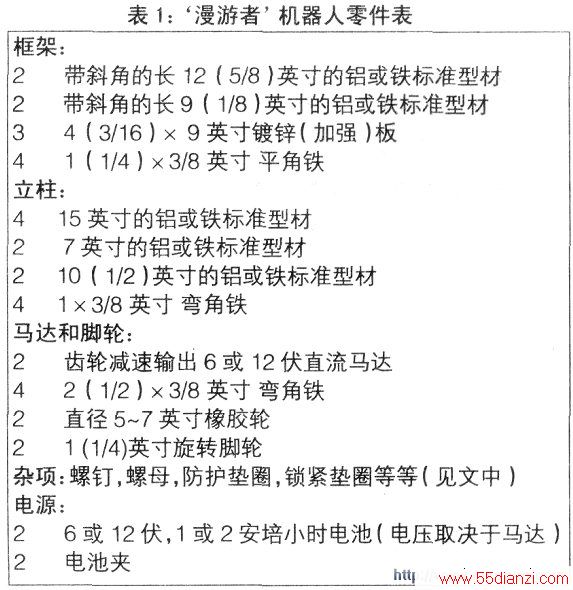
这个底座长宽各为12( 5/8)英寸和9(1/8)英寸,这种不寻常的尺寸设计使得它能够安装那些在本节后面将要讨论的加强的镀锌板。截取两条每边带45度斜角的长12(5/8)英寸的铝型材,如图所示(可参阅下表列出的部件)。同样截取两条长9(1/8)英寸的铝型材。用( 1/4)×3/8英寸平角铁和( 8/32)×1/2英寸的螺钉和螺帽把支架组装起来。必须保证尺寸要尽可能的准确,切边要整齐平滑。因为你要安装作为平台的板子,对于这个设计来说精确的正方形框架十分重要。免得固定螺丝时遇到麻烦。
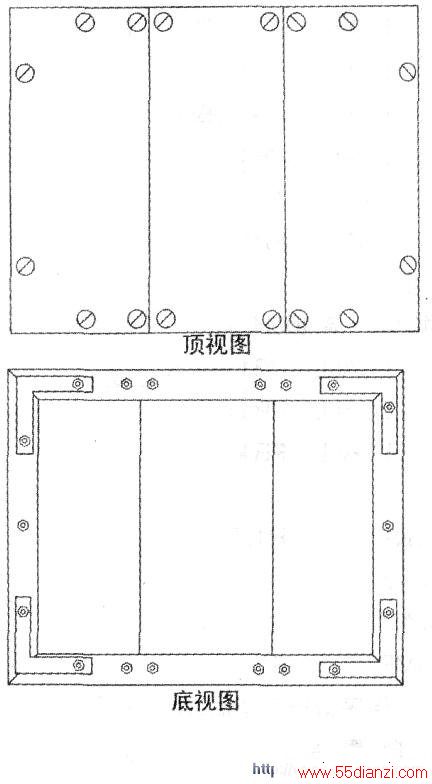
在底座的左1/3处装一块4(3/16)x9英寸的加强板,装这块加强板时暂时把拐角处的螺丝松开,如果需要的话可以在板上打一些螺丝眼。中间和右边的也按着上面的方法做。当这三个加强板全放好位置之后,拧紧所有的螺钉。在拐角内侧多钻一些螺丝孔来保证这些金属板安稳地固定在框架上面(不要担心拐角处已经有好多螺丝固定了)。用大小为8/32和1/2的螺丝把这些金属板固定在自己的位置,完成后的框架应该如上图.下面看起来如下图。
电动机
漫游机器人用两个电机驱动,分别用于移动和拐弯。电机固定在框架的中间,如下图所示。选择在中间是因为:这样台座各个地方所受的重量均匀。如果重心尽可能接近机器人的垂直中心,机器人就会少一些翻倒的危险。
样机中使用12瓦的电机已绰绰有余,也可以找一些其他电机代替。在漫游机器人样机中的电机内置的配套使用的变速箱,可使电机的转速降低到38转/分。轴长1/4英寸,轴上用1/4英寸20的板牙来套螺丝扣固定直径6英寸的割草机的轮子。如果你使用的轮子上面有螺纹,或可以在上面钻孔固定螺钉,那你可以跳过这一步。不管哪一种方法,一定要保证轮子相对于轴来说不要太厚.样机的轮子宽1( 1/2)英寸,适合的轴长度为2英寸。
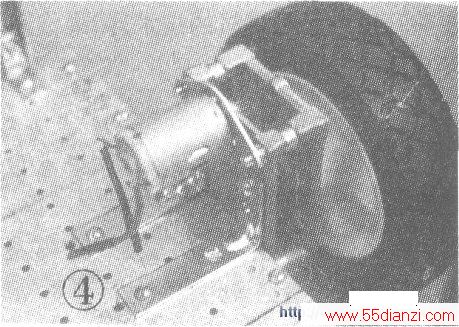
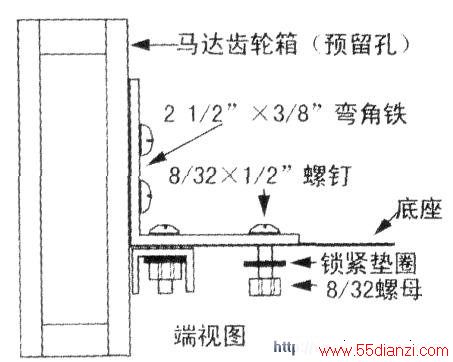
如下图所示,用两个2(1/2)×3/8英寸的角铁来固定电机。把角铁的一端切掉大约1英寸以与电机的框架相配。
用大小为8/32×1/2英寸的螺钉和螺母把角铁固定在电机上。,必须保证电机的轴垂直于框架的面,如果电机歪了,在地板上行动起来,机器人会一直偏向一边。要调整好电机的垂直度,通常需要在安装孔上花些工夫。
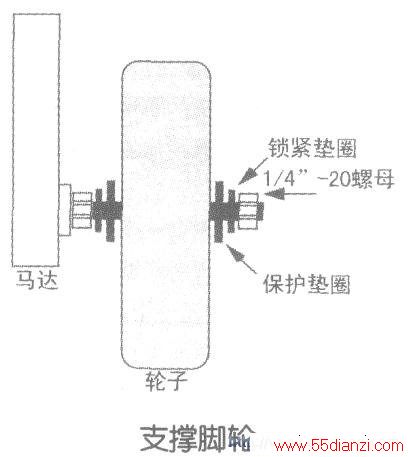
现在把轮子装上,如果轮子的毂相对于轴太大,可以使用缩小轴套。如果轴已经套好扣,拧上1/4英寸20的螺母。
如下图所示安装轮子的元件。一定要用锯齿锁紧垫圈,否则轮子可能松开或丢掉。按同样的步骤安装另一个电机。
支撑脚轮
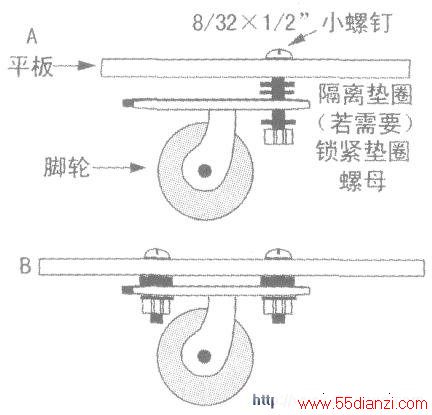
最后,漫游机器人后部必须用旋转脚轮的支撑。使用一个直径为2英寸的全方位旋转脚轮。分别在左右两个加强金属板的底部钻上螺丝孔,以固定脚轮。用8/32×l/2英寸的螺钉和螺母固定脚轮(见下图)。你可以在脚轮支座和加强板之间垫上一些东西来使脚轮和驱动轮等高(样机中使用5/16厚的垫片)。按同样的方法安装另一个脚轮。如果你用的电机和驱动轮与上述不同,那你就得自己挑选合适的脚轮。换句话说,必须保证四个轮子同时着地。在为脚轮钻孔和安装电机和驱动轮之前,一定要测量好加强板和地面之间的距离,买适合的脚轮来搭配。当然,如果需要的话,可以加垫片。
电池
漫游机器人的每个电机在正常工作时需要1.5安的持续电流驱动,但为漫游者所选的电池必须能够让电机以2安的电流工作1到2个小时,高能量的镍一镉电池组能够满足要求。漫游者还可能增加其他一些子系统。不过由于这些子系统还没有设计,无法知道到底会消耗多少能量。最好的办法是选用那种能够提供比现在所需要的更多能量的电池。
通常可以使用在剩余品商店买到的6和8安一时的铅酸电池。约6安和8安的能力正好适用于这种间歇驱动电机的情况(各种电子子系统,像单板计算机和报警系统,通常使用单独的电源)。这种高负载电池通常典型的输出电压是6伏,所以需要两个电池来为电机提供12伏的电压。为线性集成电路,如线性放大器这样的电路供电的辅助电源,则采用单独的电池,如镍一镉电池供电。一组“C”型的镍一镉电池占据不了太多的空间,但最好提前为它们留出空间,总比以后安装子系统时再重新设计整合机器人要好。
主电池是可充电形式的,这样就不需要为更换电池而频繁拆卸。但还要考虑采用的安装方式在需要时便于拆卸电源。
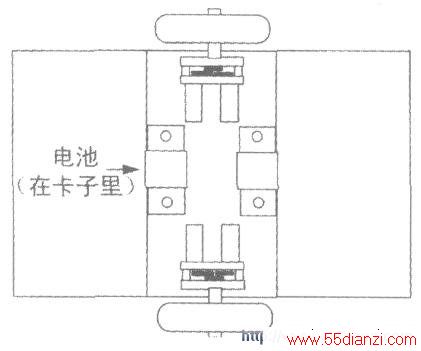
下图中所示的电池卡子可以方便地拆卸电池。这个电池卡子用宽1(1/4)的镀锌板制成,弯曲成适合电池的轮廓。在电池卡子内侧装的橡胶用来把电池固定住。
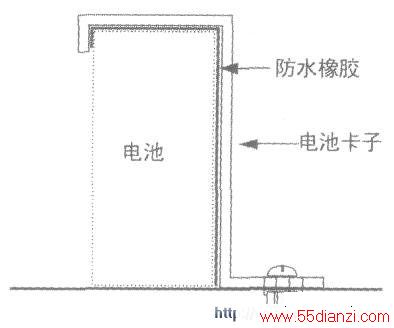
电池离两边轮子的距离相等,如下图。这样的布置使得重心刚好在中间。如果需要的话,缝隙处还可以放置一两个C型电池。
支架
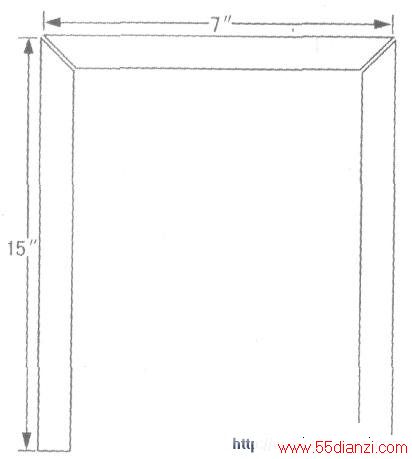
支架把机器人的高度提高大约15英寸。以后支架上面将装有各式各样的电路板、辅助电路、传感器、灭火器、吸尘器电机等别的需要装上的东西。支架的尺寸要能够很容易地放置两个标准的电路板,一个2( 1/2)磅的灭火器,和一个吸尘器,如果你还要安装其他组件,可以改变支架的尺寸。
用四根15英寸长的铝型材做支架,每根型材的一端切成90度,另一端切成45度。因为拐角都是成对的,如图10所示。在铝型材7英寸的地方加铝型材作横档,顶端的斜角如图所示。
本文关键字:机器人 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:一种智能救援机器人的设计






