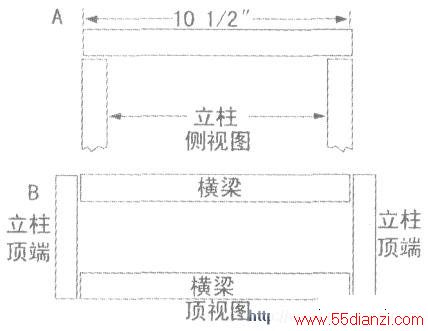
切两根10(1/2)英寸长的角型材做横梁,不需要做斜角,如图所示。
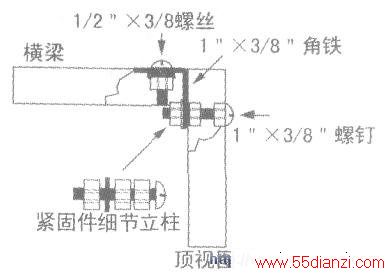
用尺寸为1×3/8英寸的拐角铁把横梁固定在支架的上端,用尺寸为8/32×1/2英寸的螺丝固定角铁到横梁上,再用尺寸为8/32xl(1/2)英寸的螺丝固定角铁到支架上。必要时可以在铝型材的内侧和角铁间安上垫片,如图所示,各处用8/32螺母拧紧。
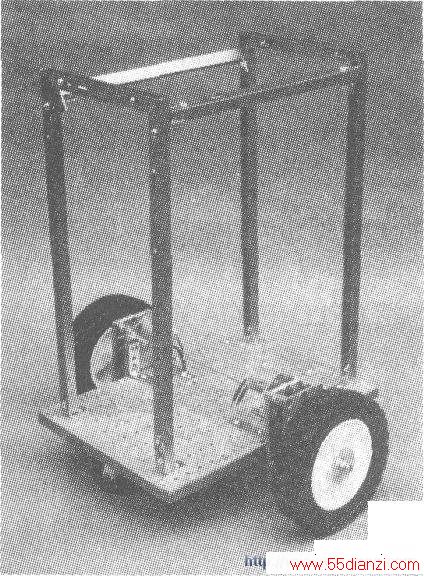
用尺寸为1x 3/8英寸的角铁把支架和底座固定在一起,同样用尺寸为8/32×1/2英寸的螺钉和螺母固定。机器人的身体完成之后,应该如下图。
上路测试
可以用一个临时开关把电源和电机接通,来测试漫游机器人的运动。使用表1中的配件,漫游机器人应该按1英尺/秒的速度行驶。实际的速度可能达不到,原因是机器人的重量。满负荷时,漫游机器人的速度平均是8~9英寸/秒。这样的速度刚好适合一个机器人打扫房间、巡视火情以及防盗。如果你想让你的机器人走得更快一点,最简单(也最便宜)的方法是使用大一点的轮子。用直径是8英寸的轮子,机器人的最高速度可以达到15英寸/秒。
而使用大轮子会带来的问题是提高了机器人的重心。现在机器人的重心保持很低,多亏了两个最重的物体:电池和电机的位置很低。如果较大的轮子提高了机器人的重心,翻倒的危险将会提高。你可以通过尽量把一些子系统安在支架下部,并且把最重的东西放得紧靠底座来降低不稳定性。你也可以把电机安在架子的下面而不是上面。
本文关键字:机器人 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:一种智能救援机器人的设计






