不去针对末端效应器是一个典型的非线性系统,且在微重力、环境温度变化剧烈的太空中,机械机构的参数随着负载状态和环境变化而变化,很难得到一个准确的动力学模型。因此文中研究的主要内容是在空间环境中,如何实现末端效应器稳定可靠的控制,完成捕获、拉紧及锁合任务。设计了高可靠性的独立控制系统,并且从软硬件的角度采提高系统的可靠性;在高可靠性独立控制系统的基础上,通过采用合理的容错控制策略来提高末端效应器的可靠性和延长使用寿命。
随着我国的空间站建设已经提上日程,空间站建设是一个复杂的大系统工程,在建设过程中要求有搬运能力强的空间大机械臂,实现目标飞行器和机械臂之间的数据传输,并能够提供航天员出舱活动的平台。针对上述要求末端效应器无疑是最合适的方案。
锁合末端效应器(简称末端效应器)是大型空间站机械臂的一部分,包括捕获机构、拉紧机构和锁合机构,主要完成对目标飞行器的捕获、抓取及释放等任务。末端效应器具有结构简单、兼容性好、在轨寿命长、可靠性高和相互性好等优点。
为了实现高可靠性末端效应器控制系统,提出并设计了高可靠性独立控制系统,并且通过从软硬件的角度提高系统的可靠性;在高可靠性独立控制系统的基础上,设计了合理的容错控制策略。该系统能够完成对其准确测试。
1 高可靠性独立控制系统
末端效应器机械机构的运动可以看作是一个点到点的运动,首先需要考虑在两个位置之间的运动轨迹,也就是运动规划问题,然后根据规划的运动要求进行执行器的控制,因此末端效应器的运动控制系统包括任务的运动规划和驱动机构的执行级控制。
1.1 运动规划
对于末端效应器的运动控制规划较为简单而且固定。为保证长期稳定可靠的工作,需要减少摩擦损耗,因此要保证运动应尽可能的平滑,也就是要求加速度要小并且变化平缓,速度变化也要平缓。在该要求下,最终的速度轨迹可以采用梯形、正弦形等形式,通过采样得到一组合适的轨迹点输入到控制输入端即可。一般情况下,速度控制的主要功能是通过有目的地限制加速度来减少轨迹误差。为避免驱动轴产生冲击、失步、超程和振荡,保证运动部件的平稳和准确定位,在启停阶段或各程序转接时,要进行加减速控制,以使进给速度平滑过渡。
目前运动控制系统中常用的加减速规律包括很多,常见的加减速控制算法有直线、三角函数、指数、抛物线、S曲线加减速等算法。在本系统中采用了三角函数加减速规律,如图1所示。由于三角函数的计算复杂,不能满足数控系统实时性要求。可以事先对其进行处理,将其做成查找表的形式存放于内存中。
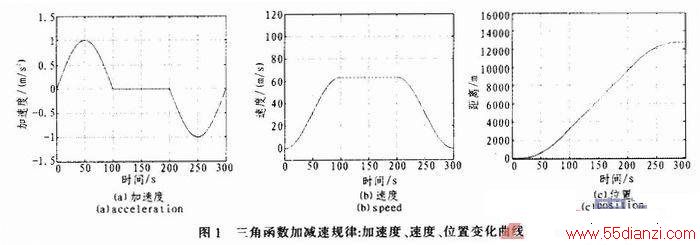
由于三角函数加减速规律可以实现平滑运动,采用这种运动轨迹,使得控制更加容易,并且潜在里也会提高系统的控制精度,延长系统寿命。三角函数的最大加速度、速度等参数要结合电机的参数和负载情况进行选择。
1.2 驱动机构的执行级控制设计
在确定了控制系统期望输入以后,关键是驱动机构的执行级控制问题,也就是无刷直流电机的控制问题。由于无刷直流电动机通过利用电子换向器取代了机械电刷和机械换向器,保留了直流电动机的优点,同时又具有交流电动机的结构简单、运行可靠、维护方便等优点,并且特别适合空间环境,因此我们这里主要考虑执行单元无刷直流电动机的控制问题。
由于运动主要依靠机械机构传动,因此末端效应器控制系统性能要求主要考虑抵达位置的高精度。高精度主要指的是控制系统的稳态特性,也就是说要求系统的稳态误差要小,而对动态特性要求不高。
1.2.1 控制方案
由直流电机运动方程可知,在忽略摩擦阻尼的情况下,加速度与电动机的转矩成正比,而且转矩又与电机的电流成正比,因此,要实现电机的高精度高动态性能控制,就需要同时对电机的速度、电流及位置进行检测和控制。因此,本控制系统通过三闭环结构实现电机的运动控制,如图2所示。
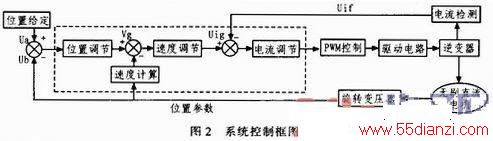
当电机处于运行状态时,给定的位置信号Ua与反馈位置信号Ub的偏差经过(位置环)PID调节得到速度的参考值Vg;控制器根据测出的反馈位置信息计算出当前转速,Vg与当前转速的偏差进行PI调节(速度环)得到电流的给定电压参考值Uig;电机绕组电流反馈信号经过电流传感器的检测得到当前主回路的电流反馈电压值Uif,将Uif与Uig进行PI计算,得到的电流调节器的输出去调节占空比,进而控制功率开关管的导通与关断,从而实现对无刷直流电动机位置、转速、电流或转矩的控制。
在三闭环控制系统中,电流环和速度环均为内环,位置环为外环。电流环的作用是提高系统的快速性,抑制电流环内部干扰,限制最大电流保障系统安全运行,电流环采用PI调节器。速度环的作用是增加系统抗负载扰动的能力,抑制速度波动,速度环采用PI调节器。位置环的作用是保证系统静态精度和动态跟踪的性能,位置环采用PID控制。
因为末端效应器的控制主要考虑位置精度,而对动态特性要求不高,因此本系统中采用了包含位置环在内的三闭环的控制方式。
1.2.2 中心控制器硬件实现方案
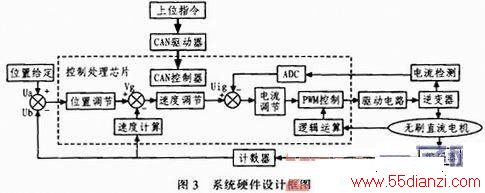
本系统的中心控制器采用的是DSP TMS320F2812芯片,此芯片内集成了A/D、PWM控制器、CAN控制器等功能模块,使得电机的控制相对简单。另外,采用高性能DSP为控制核心的电机系统具有性能优越、高可靠性、快速响应、体积小、重量轻等特点。在系统中设置了速度调节器和电流调节器,分别调节电机的转速和电流,两者之间实行串级连接,把速度调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制PWM装置。如图3即为基于DSP芯片TMS320F2812的实现框图。
1.2.3 控制系统硬件各个模块的实现方案
1)PWM控制电路实现
本系统的电机调速主要考虑采用PWM(脉宽调制)调速。调压调速是无刷直流电机目前最常用的一种调速方式,主要是通过改变加在电机电枢绕组两端的电压来改变电机的转速,这种方法通常将电机的电压由额定电压向下调节电枢电压,达到使电机转速由额定转速变为向下调速,这种调速方法调节的过程中损耗的能量小,且转速过程中系统波动比较小,静态的稳定性较高,响应速度快。是当前无刷直流电机应用最常见的、运行最稳定、最有效的调速方式,它通常有PWM调节方式、旋转变流机构调节方式以及静止变流机构调节方式。目前无刷直流电机无级调速系统也大多都采用调压调速中的PWM调节方式。
PWM调节方式是一种根据能量转换等效原理,是由将固定不变的系统电压斩截成占空比可变的PWM波,经过改变占空比来实现电机电枢两端平均电压的电压调节方式,这种调节方式的特点具有体积小、凋速性能好、成本低、控制方便等优点,与此同时,它也比较容易与控制器之间构成闭环控制系统,控制方法也显得灵活多变。因此,我们采用PWM调压调节方式。在本系统中PWM脉冲波的产生是直接通过DSP的PWM口得到。
2)驱动电路设计
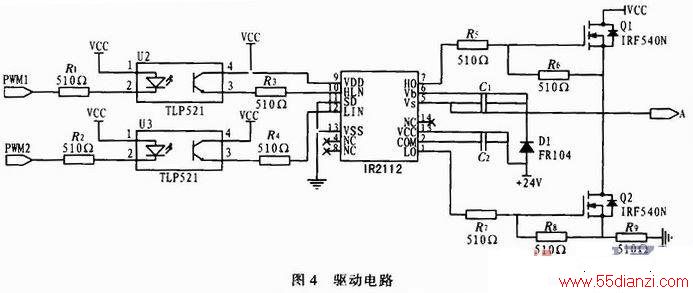
对于末端效应器系统,驱动电路部分采用专门的集成的驱动模块结合MOSFET实现。为了避免和DSP之间产生干扰,增强可靠性,采用光电隔离模块和集成驱动模块共同构成驱动电路来驱动功率MOSFET管。如图4所示,由光电隔离模块和IR2112模块组成的驱动A相桥臂的连接方式。光耦部分起到隔离和电平转换的作用。驱动三相全桥电路需要6路PWM信号,而IR2112只能同时输出2路PWM信号,所以驱动电路共需要3片IR2112芯片。
3)电流检测和速度检测电路
电流检测电路就是将电机的三相电流进行数模转换器采集,然后反馈到主控制器,与控制芯片内的速度控制器产生的电信号做比较,完成对电机的电流闭环控制。本控制系统中实际的电流比较小,功率也比较小,因此采用了一个旁路电阻来检测实际电机的相电流的大小,电阻位于三相功率变换全控的电路的桥臂和地线之间。
速度检测电路是控制系统中最重要的环节。速度检测电路检测电机的实际转速并且将检测的实际速度信号转化为电信号直接传送到控制芯片的引脚,然后在主控制器内完成对转速的计算并且和电机的预定转速作比较完成回路系统。
本系统利用控制器的计算处理能力,采用霍尔位置传感器的信号来计算无刷直流电机的转速。






