1.通过PE-51学习板板载资源来学习步进电机的控制。要求如下:
(1)按PE-51板上的P3.0按键,步进电机正转;
(2)按PE-51板上的P3.1按键,步进电机反转;
(3)按PE-51板上的P3.2按键,步进电机停止转动。
以上三点要求基本上满足了对步进电机的应用。转动速度的快慢可通过延时来调节。
2.步进电机的结构
步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
你可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时你可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机分三种:永磁式(PM)、反应式(VR)和混合式(HB)A.永磁式步进—般为两相,转矩和体积较小,步进角—般为7.5度或15度;B.反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;C.混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。这种步进电机的应用最为广泛。一般步进电机的精度为步进角的3-5%,且不累积。
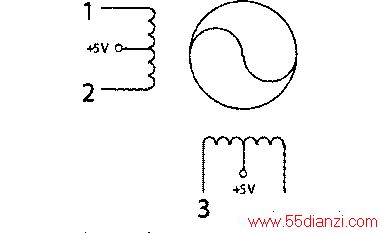
3.PE-51实验板所使用的步进电机。
其使用的是混合式四相5V的步进电机。其内部结构原理图如下图所示,其中1234为四组线圈,公共点接+5V。步进电机在工作过程中会发热,如果步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
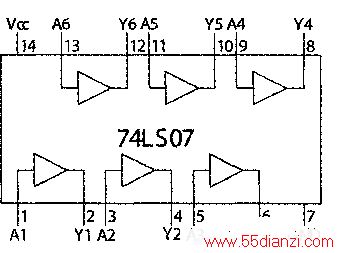
4.步进电机的控制芯片。
这里用到的控制芯片是AT89S52单片机,该单片机的输出电流不能直接驱动这个步进电机,所以在PE-51板上接上了一个74LS07驱动芯片来驱动。74LS07为集电极开路输出的六组驱动器,A1~A6为输入端;Y1~Y6为输出端。其内部结构原理图如下图所示,现用了其中的四路,每一路分别驱动步进电机的一组线圈。
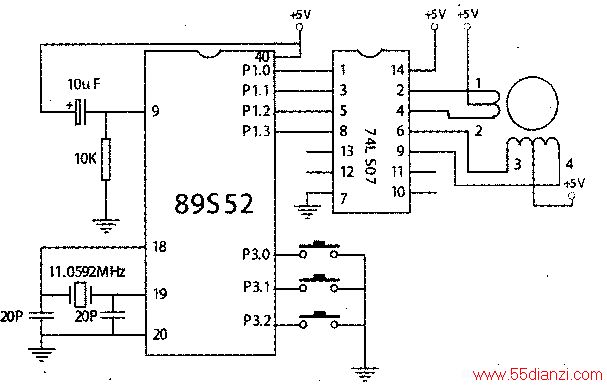
5.具体控制电路。
如下图所示,AT89S52单片机的P1.0~P1.3口分别接到74LS07的1358脚,对应着74LS07的2469分别与步进电机的1234个线圈相连,单片机的P3.0~P3.2口分别与三个按键的一端相连,按键另一端接地。
6.参考程序及注释。
ORG0000H
CC:JNBP3_0,AA
;按下P3.O键,步进电机正转
JNBP3.1,BB
;按下P3.1键,步进电机反转
JNBP3.2,CC
;按下P3.2键,步进电机停止转动
STMPCC
;反复检测
;步进电机正转子程序
AA:MOVP1.#11111110B.
LCALLKK
MOVP1.#11111101B
LCALLKK
MOVP1.#11111011B
LCALLKK
MOVP1.#11110111B
LCALLKK
MOVP1.#11111111B
JNBP3.1,BB
JNBP3.2,CC
SIMPAA
;步进电机反转子程序
BB:MOVP1.#11110111B
LCALLKK
MOVP1.#11111011B
LCALLKK
MOVP1.#11111101B
LCALLKK
MOVP1.#11111110B
LCALEKK
MOVP1,#11111111B
JNBP3.0,AA
JNBP3.2,CC
SIMPBB
;延时子程序
KK:MOVR5,#01
K1:MOVR6,#50H
K2:MOVR7,#50H
K3:NOP
DJNZR7,K3
DJNZR6,K2
DJNZR5,K1
RET
END
本文关键字:步进电机 电动机-发电机,电子知识资料 - 电动机-发电机






