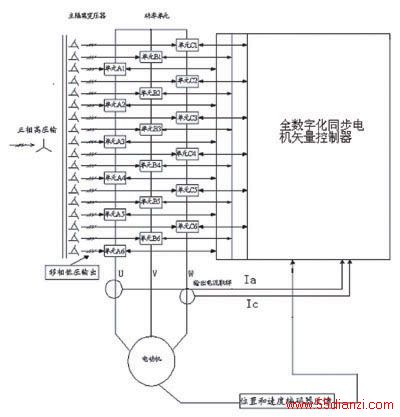
一、技术背景 近年来交流异步电机的调速应用得到较快的发展,与交流异步电机相比较,同步电机有着先天的优势,异步电动机由于励磁的需要,必须从电源吸取滞后的无功电流,空载时功率因数很低。而同步电动机则可通过调节转子的直流励磁电流,改变输入功率因数,可以滞后,也可以超前。当COSθ= 1时,电枢铜损最小,还可以节约变压变频装置的容量。 由于同步电动机转子有独立励磁,在极低的电源频率下也能运行,因此,在同样条件下,同步电动机的调速范围比异步电动机更宽。异步电动机要靠加大转差才能提高转矩,而同步电机只须加大功角就能增大转矩,同步电动机比异步电动机对转矩扰动具有更强的承受能力,能作出更快的动态响应。由于交流同步电机在可靠性与维护量、功率因数、电机尺寸与转动惯量、控制精度、弱磁比等方面有其自身的优势,对于大容量电机,世界各国已基本趋向于使用同步电机。比如工业应用上大功率空气压缩机、水泵、煤炭与有色金属行业中的大功率提升机和钢厂大容量轧钢机等均采用同步电机驱动。 国内大功率交流同步电机传动方面,以交-交变频调速传动为主。这些变流、变频传动装置功率大,一般为几百千瓦至数千千瓦。在水泥,采矿与矿山行业、船舶行业、冶金行业、化工,石油与天然气行业、电力行业、纸浆造纸行业、供水与污水处理、煤炭、有色金属等特别是矿山的大型矿井提升机传动与调速等领域已有较多的应用。大容量、低转速、高过载、响应快、四象限运行等传动领域主要用于矿井提升机和钢铁厂的主轧机,对变频器的控制要求特别严格这是普通异步电机及其变频器所不能解决的,在此类系统中应用的大多是大功率同步电机,我国目前在高压大功率同步电机控制系统中采用的技术主要以交交控制方式的变频为主,还有交直交方式,交交变频器由于其控制原理方式的制约,造成其功能和应用范围受限,交交变频器的结构方式把电网频率的交流电变成可调频率的交流电,属于直接变频电路,广泛用于大功率交流电动机调速传动系统。改变切换频率,就可改变输出频率;改变交流电路的导通角,就可以改变交流输出电压幅值;输出频率增高时,输出电压一周期所含电网电压段数减少,波形畸变严重,电压波形畸变及其导致的电流波形畸变和转矩脉动是限制输出频率提高的主要因素。输出波形畸变和输出上限频率的关系,很难确定明确界限。例当采用6脉波三相桥式电路时,输出上限频率不高于电网频率的1/3~1/2。电网频率为50Hz时,交交变频电路的输出上限频率约为20Hz。 还有一种变频器是交直交型高压变频器,这种变频器的驱动高压同步电机的方式目前以V/F控制为主,这种方式在一些对调速比要求不高,动态响应低的场合适用,它的控制方式是采用异步电机的控制策略,启动过程:高压同步电机先进行异步变频启动,等转速接近同步转速时,再对转子投入励磁电流,使系统进入同步转速运行。这种控制方式的缺点是,响应慢,调速比小,不能发挥同步电机的特长,不能实现四象限运行,高压同步电机输出的转矩低,起动电流大,容易失步,这种变频器只能用于负载较轻,负载变化不大的场合。 随着微电子技术的发展和应用,计算机用于控制,使交流变频控制系统由模拟式进入数模混合式,进一步发展到全数字式,实现控制方案和控制策略的软件化,在控制系统全数字化的情况下,由于改变软件即可改变控制模式和参数,这就大大提高了系统的通用性和灵活性,简化了系统的硬件结构,并可采用一些基于现代控制理论的控制算法来提高系统的性能。更重要的是,随着现代通信技术、远程控制技术、总线技术和自动化技术的发展,全数字方式是未来发展的必然趋势。因此全数字化交-直-交大功率同步电机矢量控制器的应用是未来应用的方向,这方面在我国的应用和研究还是空白,变频调整控制方法的进展主要体现在由早期的静态控制方式向高动态性能的四象限运行的矢量控制发展,采用这种控制方式可以有效的解决高压同步电机的动态响应,和调速比宽等要求,系统可以恒转矩输出。 二、全数字化矢量控制方式技术方案的原理 鉴于现有技术缺点,和要实现的技术目的,我们要实现的高压同步电机矢量控制变频器的实现由以下技术特点和单元组成,三相高压电输入移相隔离变压器,经移相隔离降压多路交流输出后,输入到带能量回馈的功率单元IGBT整流并滤波成直流再经IGBT逆变输出到同步电机;电机的位置速度传感器反馈的信号经高速串行编码传输方式传送给主控板的FPGA进行解码处理后,送给DSP进行数据运算处理;电流反馈经霍尔传感器采样,上传信号板经模拟信号处理电路滤波处理后再上传给DSP主控板的AD采样并运算;主控板与上位机的人机界面进行实时数据通信,并上报系统的各项运行参数和故障状态;输入输出信号单元板与主控制器进行通迅,处理外部输入输出信号的控制功能;系统的原理如图1所示。