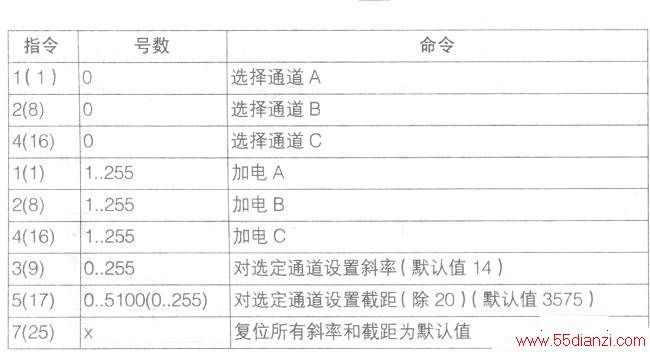
下表给出了在ROBOLAB程序中所使用的指令的概况,并且分类给出了实际传送的值。如前所述:在调整伺服参数时,一定要十分仔细,以避免由于伺服电机过冲而引起危险。一般采用小步进行调整。
五、组装
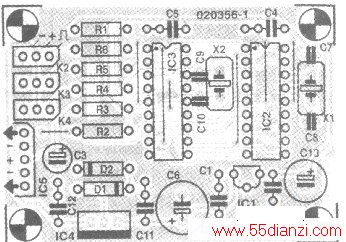
印刷电路板(图4)很小,但很容易组装。因此,装配不存在什么问题,仅需要注意一些飞线。因为使用单面印刷电路板,所以必须另外连接这些飞线。
飞线共有6根,3根在集成电路下面:
一根在IC2下面,另两根在IC3的下面。这些线最好使用绝缘线,焊在板子的背面。也可以使用镀锡导线,在元件面焊接,在集成电路或其插座下面通过。在任何情况下,都要先焊好飞线,再安装无源电路,最后再安装有源电路。
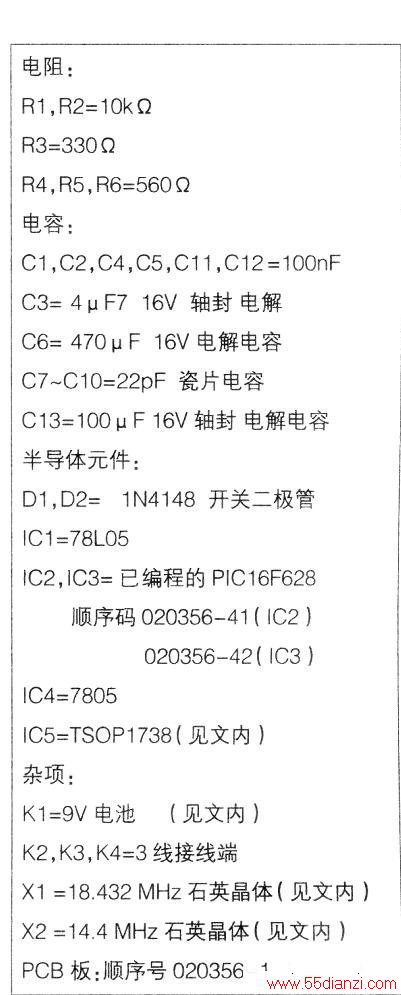
焊接要小心,注意各元件的数值;电解电容和二极管的极性,以及集成电路的安装方向。稳压器IC4的散热器安装要离开电路板的边缘。
9V电池接到标有K1的接线端上。
电路的耗电量取决于伺服电机的数目和耗电量。如果空间允许,最好使用6节1号电池组装在一起的电池盒,使用9V积层电池的使用寿命太短。大约要差5~6倍。
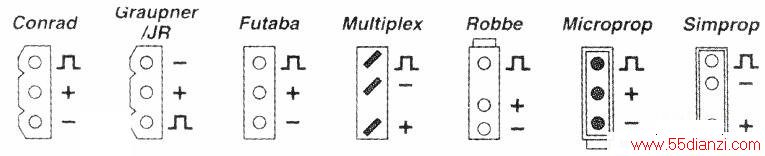
红外接收器IC5不需要直接焊接在印刷电路板上,可以通过3根导线引出到远离板上所标IC5的位置安装。也可以使用其他有类似特性的红外接收器取代元件表中给出的TSOP1738。一些可用的替代品在电路图(下图)中给出,同时还给出了各自的管脚配置图。
所有的IC都是3个引脚,但在印刷电路板上为IC5提供了5个孔,目的是使所推荐的任何一种IC都可以直接焊接到板上。14.3MHz晶体X2也有可替代品。如果买不到这种晶体,可以使用更容易买到的16MHz的晶体代替。一般无线控制用的伺服电机可以适应这一变化。
3个伺服电机接到端子K2、K3、K4上时,必须试验其引脚是否合适。各厂家的伺服电机的连接电缆端的标记方法常常不同。常见的无线电遥控伺服电机引脚配置方式见下图。
六、操作方法
这里介绍的伺服电机驱动接口可以使用RCX2.0版的固件ROBOLAB2.5.可以通过LEGO支持软件(RS232或USB版)或从RCX本身来控制。
下图显示一个带有两个并行任务的简单程序界面。这个例子中,RCX按照接触传感器上所施加的压力大小来增、减红色伺服电机的转角。开始时位于中间位置。颜色红、黄、蓝遵循通常ROBOLAB的颜色代码习惯。
第2幅程序界面图,使RCX进入远距离红外通讯模式。显示了当前的斜率值。截距也可以用同样的方式调整。
调整斜率可以增加或减少伺服电机总的运动范围,而改变截距仅影响零点的位置。
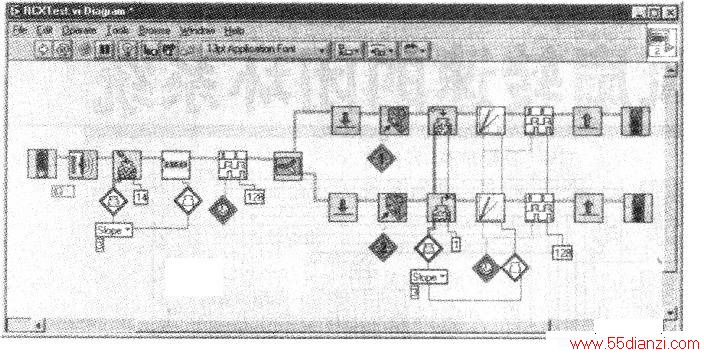
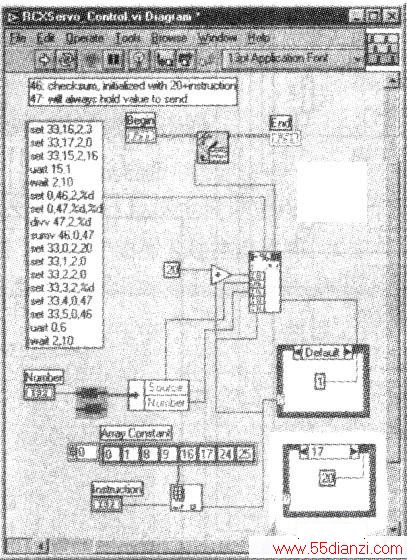
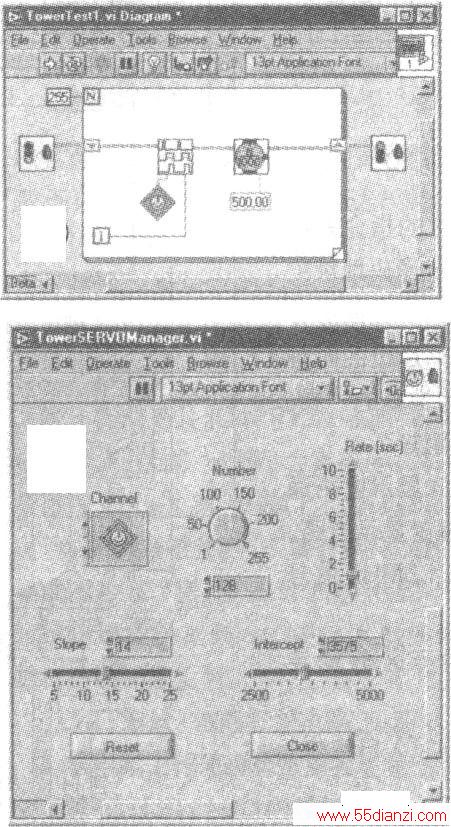
如通常在ROBOLAB/LABVIEW中那样,各程序段可以集成在一起,并且用一个新的图象形式表现出来。即使是最复杂的程序也能组织在一个高级画面中。上图给出了RC×程序的核心部分,驱动RCX的UART传送器。在LEGO Mindstorm SKD中可以找到UART的更多信息。中图显示运行在PC上的简单程序。红色伺服电机缓慢转动超出其操作范围。注意使用LABVIEW作为带移位寄存器的回路。
在右手一侧离开主框的数据被存入重复端的移位寄存器中。这使得诸如检测检测某些程序错误的操作十分简单。在主框之外的两个图标是负责与LEGO支持软件通讯、初始化和结束操作的。
此程序可在ROBOLAB中找到支持软件的连接配置。通常的ROBOLABRCX直接模式不能使用,因为程序会等待一个从RCX来的应答信号。而在本系统中,传输是单向的。
最后,下图显示了RCS伺服电机管理程序的控制界面,它是非常容易使用的。斜率和截距都可以调整。只有当其值改变时,支持程序才发送。如果一个值连续变化,变化速率决定干传输频率。
元件表
上一篇:DIY一台IPHONE4






