触须的外端是一个大弧钩,避免钩住障碍物;而内端则是一个小折钩,主要用来固定。

外端大弧钩和内端小折钩的平面方向必须是互相垂直的,即把大弧钩平整在桌面上时,则小折钩应该是垂直于桌面的,这主要是因为触须所连接的碰撞开关是垂直桌面安装的,而触须延展的平面应该是平行桌面的。

原来接线端子的插口比较宽,需要改小。

先用剪刀把接线端子的插口沿边缘剪掉一截。

然后再用尖嘴钳重新把接线端子的插口改小,要求正好能够插入碰撞开关的摇臂。(以下最左边为原来的接线端子,中间为改小之后的端子,右边为碰撞开关)

把钢丝触须的内端小折钩套上接线端子细的一头,应该正好能够套上,如果不合适可以适当调整触须小折钩的弯曲程度 ,然后把接线端子的折扣用尖嘴钳夹紧。

把接线端子粗的一头,如下图所示套上碰撞开关。

用尖嘴钳夹紧接线端子的折口,把触须与碰撞开关连接起来。

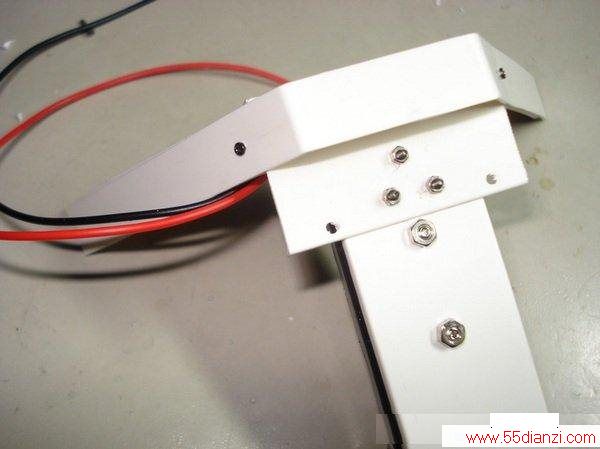
在上身结构部分,中间三颗固定螺丝两侧,如下图所示用2毫米左右的钻头各打上一个小孔。注意小孔不要顶住腹部的电池盒,要错开偏外侧一点。
碰撞开关上有两个固定用的小孔,把碰撞开关如下图所示安装在上身结构上,并用M2*10的螺丝以及螺母固定好。注意两个碰撞开关之间夹角大概是90度左 右。把螺母拧紧之后,则一个螺丝就可以把碰撞开关的位置固定好,而不需要把碰撞开关的两个固定小孔都上螺丝(即便想要上两颗螺丝也不行,因为内侧那个固定 小孔的位置下面正好对着腹部安装的电池盒,无法再上螺丝)。
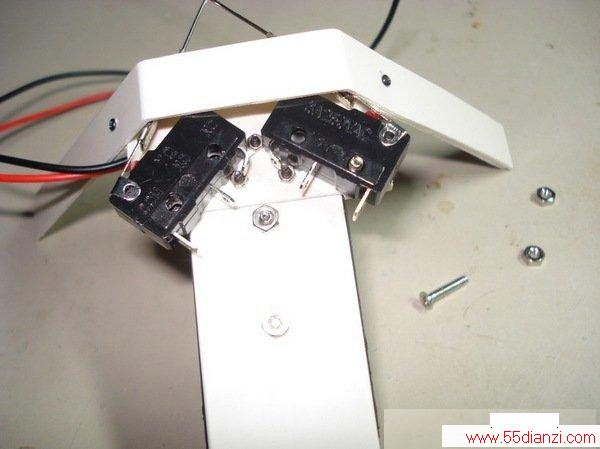
安装好触须和碰撞开关。
4 项目总结
本项目向大家展示了一个简单的智能机器人的制作过程。对于刚入门或者准备入门的朋友,可以通过这个项目了解该机器人基本的运动机理和控制原理,可以温习一下电学基础,如果能够跟着实践一下,还可以练习一下动手能力,包括基本的机械结构制作以及基本的电路连接。
本项目机器人的机械结构相对来说是一种非常简单但又是很实用的设计,后续将要深入介绍的其他机器人有一些也将会继续采用该机械结构,只是到 时候会把介绍的内容重点转向其他如电子、计算机等方面,所以为了后续的内容理解上更顺畅一点,希望对于本项目有条件的还是可以实践一下,真正动手了体会才 会深刻。
上一篇:S51单片机下载线的制作






