小电站取1毫米左右直径钻头,对用笔做好的圆点标志进行打孔。

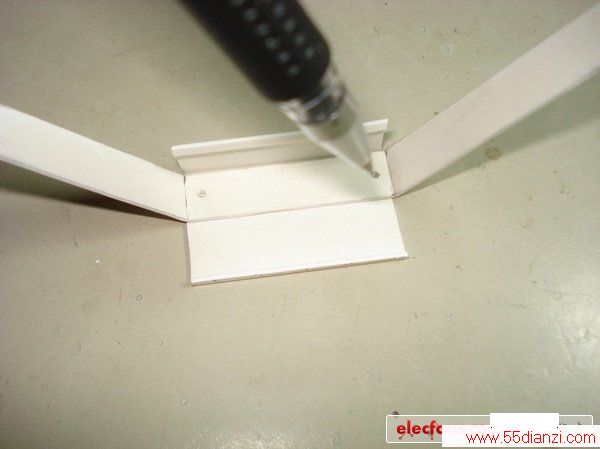
把打了孔的前脚结构按下图的样子按在上身结构上,前脚结构已经打好了孔,用笔透过打好的孔对着下面的上身结构做标记。也就是为在上身结构上打孔作准备。
据笔做好的痕迹,用小电钻对好进行打孔。

把前脚和上身组装在一起,并用M1.2*5的螺丝上好。
注意,如果小电钻的钻头直径过小,直接打出来的孔可能无法上螺丝,这个时候可以用小锥子把孔撑大。
3.5 组合上身与腹部
接下来把上身结构和腹部结构组装起来。
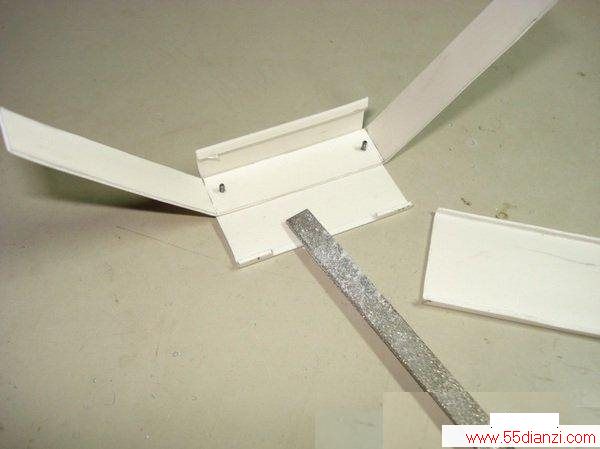
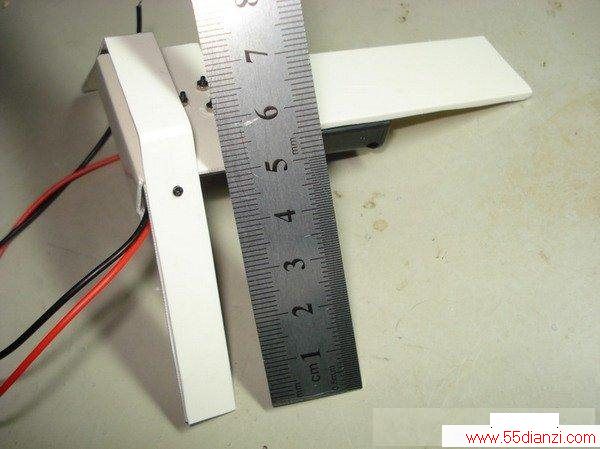
按照下图所示,把在上身结构中折边低的那一侧,对着腹部结构的宽度(大概2.5厘米),用笔做好痕迹。

用刻刀(或裁纸刀),对着笔做好的痕迹,把中间的折边部分去掉。

并用锉刀进行打磨平整。
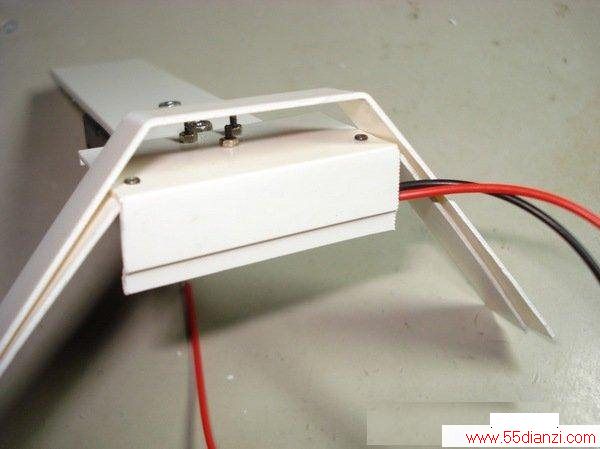
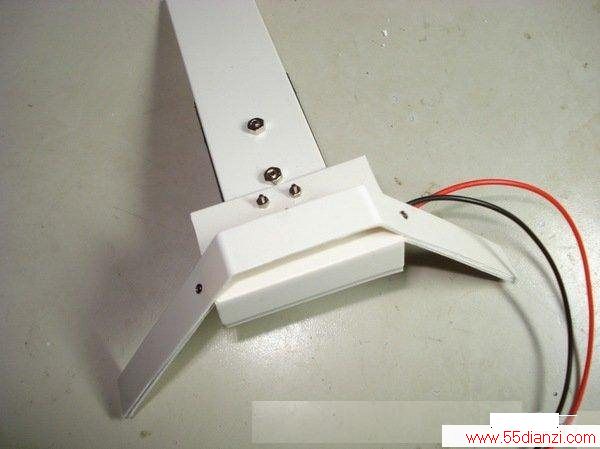
然后可以把腹部结构如下图那样安置,并且与上身结构部分能够贴合得比较好。 同时可以把前脚结构与上身结构的螺丝上好螺母固定起来。

如图所示在腹部结构与上身结构的结合部位,用小电钻打好三个小孔。
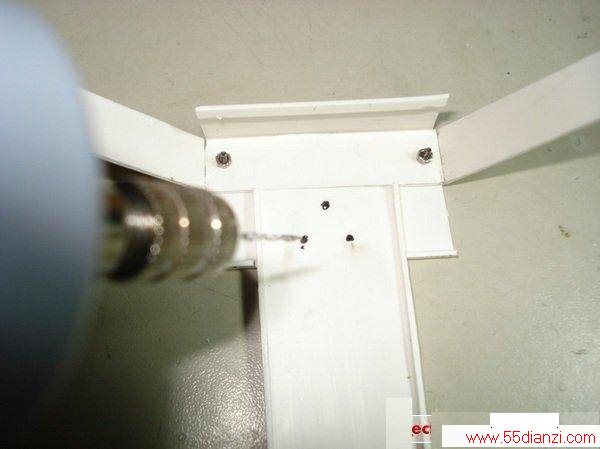
然后在三个小孔上用M1.2*5的螺丝螺母固定好。

于是把上身结构与腹部结构组装在一起。

3.6 电池盒
安装电池盒。
把电池盒如下图所示放置在腹部结构的下面,并用笔对着电池盒上原有的小孔作好标记。

小电钻换上2毫米直接的钻头,对着笔做好的标记进行打孔。
因为腹部结构的两侧有折边,所以如果直接把电池盒放置在腹部面上无法贴合紧密,所以在打好的孔上再放置垫片。
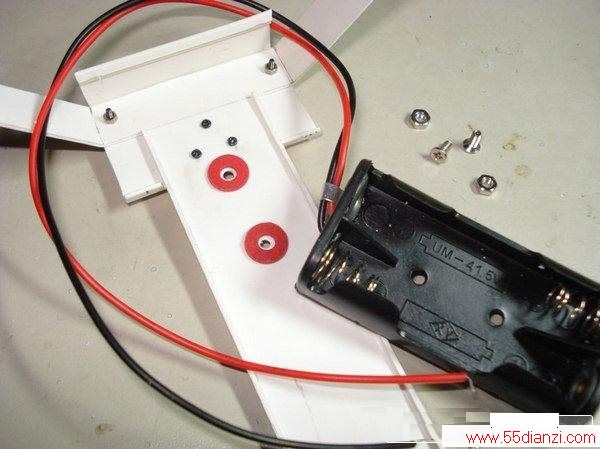
把电池盒贴合在腹部底上,用M2*5的平头螺丝以及螺母固定好。这里之所以用平头螺丝,主要是防止螺丝头太高顶出来影响到放置电池。

3.7 前脚组装
这里安装完善前脚结构。
如下图所示,在已经与上身结构组装在一起的前脚结构上面,叠上另外一条前脚结构的矩形条。
如图所示,用手握住前脚结构的一只脚,把两条矩形条叠在一起,并且把前端对齐(小手指顶住的那边)。

对齐前脚前端,大概里前端5厘米处用1毫米直径的小电钻打孔,并用M1.2*5的小螺丝固定好。
如下图所示的前脚结构组装完成。只要两条前脚矩形条的两侧前端都是对齐的,则可以确保两条矩形条之间有一段如拱桥一样的空隙,下面可以用于安装碰撞开关。
3.8 触须
触须作为探测前方障碍物的传感器,是实现本机器人的关键部件。
触须分为左右两边,各由一组碰撞开关、钢丝、插簧接线端子组成。

为了在较小的空间内把碰撞开关安装上,需要用尖嘴钳把如下图所示的碰撞开关的一只引脚折弯。按以上的尺寸设计如果不折弯的左右两边的碰撞开关可能会顶在一起装不下。

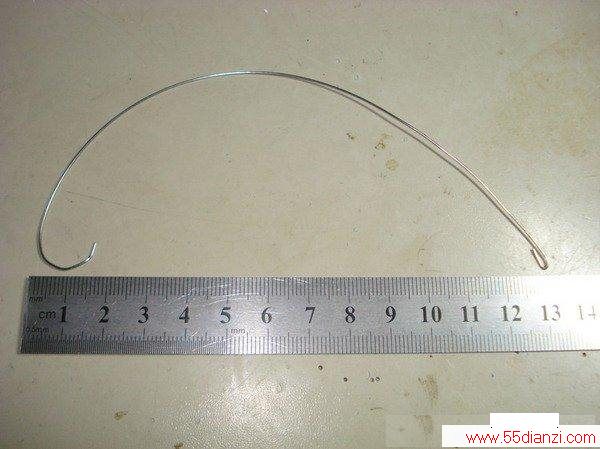
用尖嘴钳把一段钢丝折出如下图所示的弧度,弧宽度大概在10-13厘米左右,这个宽度决定了机器人探测目标的范围。越宽的话正面探测的范围就越大。
折好一条触须后,把钢丝沿着做好的触须并在一起,再用尖嘴钳折成另一边触须。如此可以确保两边的触须基本保持一致。

上一篇:S51单片机下载线的制作






