�����ѵ�������������?����ϰ�ܿ��ڴ�ֱ��ǽ���ϼ���?——��Ҫ�ó�ݵ�Ŀ��ע���ң���Ȼ�Ҿ��Ƿ����߱ڣ������еĿɰ�����Wallbots!��Ȼ��Ҳ��������ƺ��ҵ���������֩������

ǽ����������ȥ��������?!ĪҪ���ţ��Ȳ��DZڻ�Ҳ���DZ���֩�룬�����ǿɰ���Wallbots——���ڴ�ֱ������д�Խ�Ļ����ˡ���֪����ô����?�źߣ����¿���~СW�������κκ�����ǽ�����ƶ����������ݣ��װ壬���䡢�����š�СW���䱸�˼����������ͨ�����ǿ��Խ��мĽ����� 3��ģʽ�ɹ�ѡ��ͨ�����������ת������ɫ�ߵÿ죬�����ϰ���(�����˵��ֻ���СW���ֵܽ�����);��ɫ�ߵ�����Զ���ϰ�;��ɫ�ߵ�������������ʱ��ȫֹͣ��
1 ���ߺͲ���

�� һЩ����������Ӳ��
�� ��Ե����
�� ��
�� Ӳ��ֽ
�� ����
�� �Ƚ�ǹ
�� ����
�� ��ǯ(���ߵ��Ǹ�)
�� 2.2Kŷķ����*4
�� 10Kŷķ����
�� 100ŷķ����
�� Arduino Mini(��Ƭ��)
�� �ŷ����*2
�� ����Ƭ*6
�� 1��RGB LED��
�� 1�����͵ĵ��
2 ʹ�ŷ����������ת֮����ƪ

�� �ѹ̶����Ŀ��Ӵ���ÿ���ŷ��������ľ��ܵõ�������Ҫ������ת�������˿����ӡ�

�� �ѷ���ת���Ŀ��Ӽ�����������λ�ƾ���һֱ��������źš�
�� �����ɫ�IJ�������������ת��180�Ⱥ�ֹͣ�ģ�����û?������ɫ����СƬ����

�� ȡ�³���
�� �Ѻ�ɫ�����ϵ�����(��һ�����������ô��������)��

�� �ѵ�������ת����С����Ƭ��������
3 ʹ�ŷ��������ת��֮����ƪ

�� ���ڣ���λ���ѱ��ɹ���Ϸ~(�R���Q)/~����һֱ�ɼ������źš�
�� �Ӻڿ����ϼ�����ɫ����ɫ�ͻ�ɫ����(���Ӧ������һ����������)��

�� ��ɫ���ߺͻ�ɫ��֮�亸��2.2K�ĵ���
�� �ں�ɫ�ͻ�ɫ����֮��Ҳ����2.2K�ĵ���
4 ��������

�� ����ͬģ���ź��£��ŷ�����ת��һ������ͬ�ġ����ǶԳư�װ��СW�ϣ�����Ҫ��һ��������ô��?��Ӳ���������϶����Խ��(����Ӳ�����ģ���Ϊ���Ǵ������ˣ�ˤ!)��
�� ���µ������������ϵĺ�ɫ����ɫ���ߡ�
�� ���Ӻ��ߵ����ߣ�Ȼ�����ߵ�����(ͷ���˰�?��ʵ������ͼ����������һ��)��
5 ��װ���
�� �ⲽ������!����������ΰ��������ŷ����������棬Ȼ��ѳ���װ��á��������Ҽ��˵������ǰ�Ŀ��ӾͲ������ˣ��������þ�Ե���������Dz���һ����ġ�
6 ��������

�� ��ô����ȥ��?���õ��Ƚ�����ʵ�κ�ճ��ǿ�������������ʹ���ȼ�����1Ӣ�糤��Ӳ�ߡ�

�� ��ÿ�������Ƚ�ճ���ŷ��������ij������档��Ҫ�룬¶һ�����!

�� ��ÿ���ߵ�ĩ��ճ3�����̡�����Ҳ�����Ƕ�����!
7 �ŷ����뵥Ƭ���Խ�
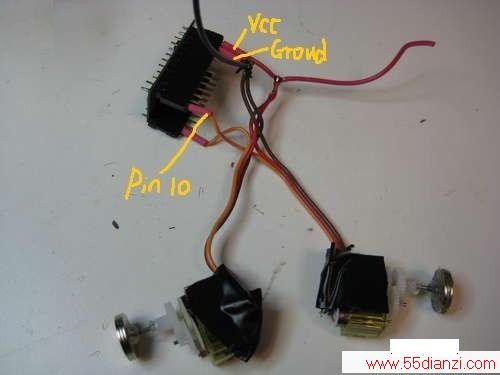
�� ����PIN 9�� PIN 10�����������
�� Pin 9 >�ŷ���1�ij��ߡ�
�� Pin 10 >�ŷ���2�ij���
�� Ground >�ŷ���1,2�ĺ��ߡ�
�� VCC >�ŷ���1��2�ĺ��ߡ�8 �ӹ�������
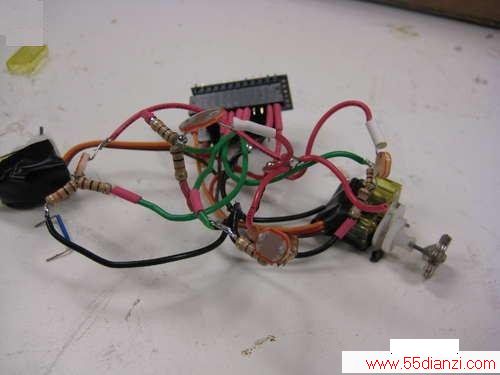
�� ��ÿ����������(�����)������Arduino�ϣ�һ��4�������������ҡ�ǰ����
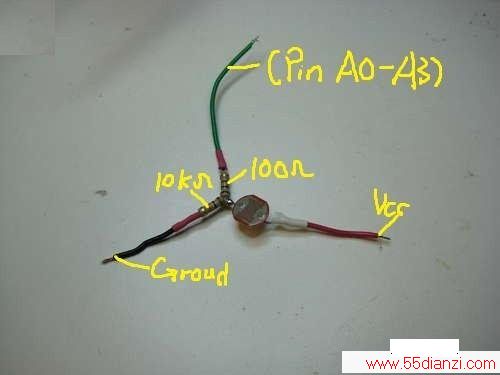
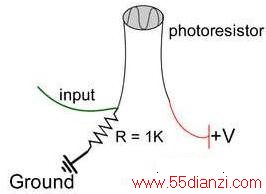
�� ÿ��������ĵ�·ͼ�����У���������һ�������ӵ�VCC;��һ��������10K��100ŷķ�ĵ����ϡ�10K����ӵأ�100ŷķ������������ˡ�ÿ��������������(����)����MINI�ϵ�ģ��˿�(A0,A1,A2,A3)��
�� �ҳ��������������õģ�Analog 0 > �����Ĵ�����;Analog 1 > ��ߵĴ�����;Analog 2 > ǰ��Ĵ�����;Analog 3 > �ұߵĴ�������
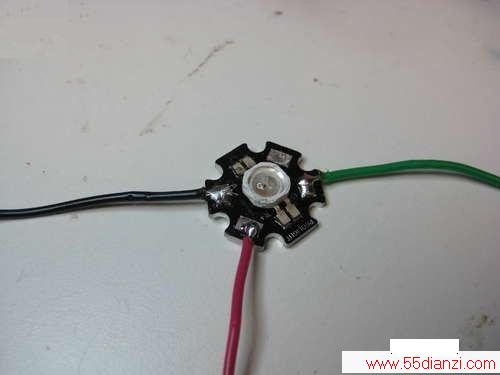
9 ����RGB LED��
�� ��ÿ����������(�����)������Arduino�ϣ�һ��4�������������ҡ�ǰ����
�� ���Dz�������ÿ���˿ں�LED��֮��Ÿ�����(200 ŷķ����)?��û�н��ϣ���Ϊ�ҵ�LED�ƿ��Գ��ܵĵ�ѹ��Arduino���ṩ�ĸߵö࣬���Բ��ᱻ�ա�
���Ĺؼ��֣������� ����Ԫ���� ���� �Զ�����-��Ƭ������������ - �Զ�����-��Ƭ��






