随着稀土材料和控制理论的发展,永磁同步电机PMSM在各种高性能场合的应用日益广泛。在PMSM伺服系统的控制中需要实时而准确地检测当前转子位置信息,为了得到这些高分辨率的位置信息,传感器一般为编码器,固定在转子上,这样虽可以保证精度,但增加了系统的尺寸和成本,特别是增加了转子的惯量,并且需要连接电缆,引出系统成本、可靠性和噪声干扰等问题,为了解决这些问题,无位置传感器系统应运而生,但是目前的这些无位置传感器系统的控制算法一般比较复杂,每一种控制算法都是在做出一定的假设之后才能得出最后的结论,不能在全速范围内都有很好的控制精度。特别是电机转子位置的估计上还有比较大的问题,有时甚至会估计出与实际转向相反的结果,影响系统的控制性能。解决这种问题的有效方法之一就是采用低分辨率的传感器来取代无位置传感器,这种传感器的位置反馈是方波,采用一定的控制算法利用此反馈方波信号来精确估计转子的速度和位置。整个系统的组成、安装和调试比较简单,既降低了成本又可解决无位置传感器伺服系统在启动和低速运行时所存在的问题。
永磁同步电机伺服系统模型
一个3相2极的装有霍尔元件的PMSM结构示意图如图1所示,根据图1的结构和坐标设定可以得到式(1)以及表1所示的霍尔元件的位置输出信息。

图1 PMSM结构模型示意图
其中uu、uv、uw,iu、iv、iw,ψu、ψv、 ψw分别是三相绕组的电压、电流和磁链,假设三相绕组电阻相等为 ,磁链表达式如下所示。
在上式中:Lij当时,Lij代表每一相的自感,而当i≠j,并且时Lij代表各相的互感。ψf是永磁体的磁链,θ是转子的位置,上面的自感和互感的参数可以用下式表示:
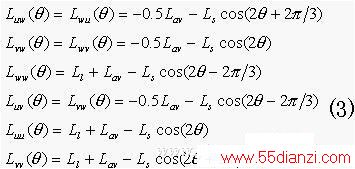
其中Li、Lav、Ls分别是漏感、标称电感以及与转子位置相关的电感量。由此可见PMSM转子的位置与许多因素有关,比如电机的相电压、电流、磁链以及电机本身的一些参数如绕组的电阻、电感等。
为了便于磁链估计的实现式(1)还可以改写为如下的形式:

其中ψuvw、u、i分别是三相磁链、电压和电流。根据有关文献[2],
PMSM电机的电磁转矩可以表示为:

其中ωr是机械角速度,pn是极对数, ω转子电角速度,en、ev 、ew是各相的反电动势:

若相电流正弦分布:
其中im是相电流的幅值,这样电磁转矩的表达式为:

基于磁链法的转子位置估计
由式(5)可知,反电势、相电流对电磁转矩都有影响,若反电势和相电流的检测或观测出现误差,都将直接产生转矩纹波。若电流是正弦分布的,则可得到式(8),即转矩是一个恒定的常量,与转子位置无关。电流的正弦分布是需要高精度的位置反馈信息的,若采用霍尔元件作为位置传感器,就要进行转子位置的精确估计,本文采用基于磁链法的转子位置估计器来得到精确的转子位置信息,从而保证相电流的正弦分布。采用低分辨率位置传感器的PMSM伺服系统如图2所示。
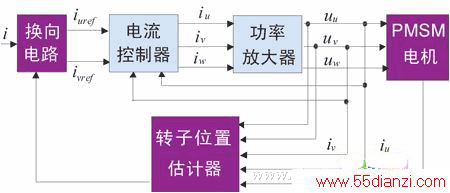
图2 霍尔元件作为传感器的PMSM系统示意图

图3 转子位置估计器方框图
图2包含了PMSM电机、电流控制器、换向电路和转子位置估计环节等几个部分。其中基于磁链观测法估计转子位置的估计器的结构如图3所示。输入信号是电流控制信号i,换向电路利用这个电流控制信号和位置估计器输出的转子位置信息得到优化的参考相电流输入给电流控制器,电流控制器将参考相电流与实测相电流进行比较得到相应的电流控制信号给功率放大器,从而驱动PMSM电机。转子位置估计器包括磁链估计、磁链校正、第一级电流估计、第二级电流估计和位置校正等环节。对于转子位置估计器来说,其输入信号有电机定子电流和电压信号以及作为位置传感器的霍尔元件的输出信号,其输出就是具有较高精度的转子位置信号。磁链的估计利用式(1)来实现,然后利用估计出来的磁链和霍尔元件输出的位置信息,通过式子(2)可以得到第一级的估计电流iouvw,然后可以得到估计电流iouvw和实测电流iuvw的误差输入到位置校正环节。位置校正环节的输出θe等于霍尔元件输出的位置信息θH加误差信息Δθ。而由于磁链是电流i和转子位置θ的函数,根据文献[1],位置误差信息Δθ可以利用磁链矢量和电感矩阵以及第一级的电流估计误差得到,如下式所示:

电感矩阵如式子(2)和(3)所示, Δi为电流估计误差,若磁链估计是正确的即 。而,
图3中磁链校正环节的作用主要是消除各种测量误差以及初始条件的不确定性可能带来的误差。磁链校正环节利用 θe和磁链估计值,利用式(2)可以得到一个比较精确的电流估计值i*uvw,同时就可以得到另一个电流估计误差,然后用类似式子(9)的方法计算磁链校正量,此时需要假设位置估计是正确的即Δθ=0,这样可以得到磁链的校正量:
其中

试验研究
试验系统硬件电路由永磁电机、功率变换电路、控制电路、检测(反馈)电路和保护电路、键盘和显示电路组成,以TMS320F240作为控制核心,它与位置检测、功率变换电路和电流检测环节相互关联,构成整机系统,如图4所示。

图4 PMSM伺服系统原理图
永磁电机参数为:p=4,ψf=0.175wb,R=2.875Ω,ld=8mH,图5为给定1000r/min时系统的速度阶跃响应,阶跃响应时间约为0.15s,在同类产品中属于较好的指标。图6是相电流的响应曲线,对应于速度的上升相电流幅值也增加,并且是比较标准的正弦波曲线,符合理论推导的假设。图7中系统在运行过程中将负载从2N.m突然增加到4N.m时,速度稍有波动然后趋于平稳,说明系统具有较好的鲁棒性(图中横坐标时间每格为500ms)。
上一篇:矢量控制高压变频器过流保护分析






