l引 言
步进电机是一种将电脉冲信号转换成角位移或线位移的电磁机电元件,具有成本低、控制特性好等优点,已广泛用于
数控机床、
自动化仪表等设备中的位置驱动系统。如在我国目前生产的数控系统中,有近百分之80是以步进电机作为伺服单元。但步进电机也存在着很大的缺陷,在速度较高或加速度较大时易出现失步现象,这样其控制的机械部件运动精度就很低。因此,提高步进驱动系统的精度和可靠性,已经成为必须解决的一个关键问题。在这方面,目前国内外作了大量的研究,如步进电机的最优升、降频特性研究、细分步控制技术研究等。本文探讨模糊控制理论用于步进电机闭环控制技术的研究,并成功地应用到雷达罩天线座跟踪测量仪控制系统中,既提高了伺服跟踪精度和跟踪实时性,又有效地避免了系统的振荡。
2步进伺服驱动系统的误差恃性和控制方法
2·1 步进电机伺服驱动系统的误差特性
常规开环步进电机
伺服系统精度低的原因主要由以下几个方面的误差因素造成的:
(1)对于步进电机,因工艺制造等方面的原因,其步距角不可能做得太小,定子、转子各齿距间存在制造误差,齿距不均,造成其运动具有步进感,产生振荡,各步距间存在步距误差。
(2)由于一般步进电机的功率较小,步进伺服系统中一般都含有如齿轮副、丝杠螺母副等传动副,它们间存在间隙,致使运动部件位移同指令值之间出现多值非线性关系。
(3)系统传动链中各传动元件的制造误差和磨损等造成传动误差,并随位移非线性变化。
(4)伺服系统中各传动元件的刚性不足,在载荷作用下产生弹性变形和塑性变形,且载荷不同,变形量不同,从而造成进给脉冲被“吃掉”的现象,严重时甚至出现爬行,使得输入输出之间也呈现非线性关系。
可见,各种非线性误差因素的影响,必然使执行机构实际位移偏离指令值,出现偏差,且呈现较强的非线性和不确定性特性。
2.2 闭环控制方法的确定
现代控制理论发展迅速,控制方法很多,应采用方案简单且控制效果又最佳的方法设计闭环控制系统,由于作为被控对象的步进电机伺服系统,具有较强的误差非线性和不确定性,如雷达罩天线座跟踪测量仪,在跟踪目标时,因室外风载荷影响而具有不确定性,致使输入输出的关系很难用一个数学函数式准确表达,因此很难求取用于这种场合下的精确的步进驱动系统的数学模型。这样,依据常规的控制理论和方法设计闭环控制器,其控制效果显然不佳,甚至不能满足要求。针对这种具有多种模糊性因素影响的被控制对象,进行有效控制的最好的方法就是采用模糊控制理论[1]。模糊控制论的崛起为这些问题的解决开辟了新的途径。近年,基于人工智能和神经网络的现代模糊控制理论已成为解决复杂、随机、不确定、时变系统控制的强有力的数学工具。
3步进伺服系统适应性模糊控制器设计[2,3]
对于步进电机运行的闭环控制,这里采用两输入单输出的模糊控制器。两个输入量分别是天线阵面跟踪角位移的偏差和偏差变化率,输出量是步进电机的运行频率。一个典型的模糊控制器都包含有三个环节:精确量的模糊化、模糊推理和反模糊化。
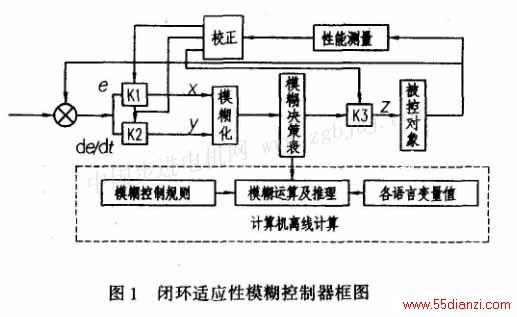
为提高实时性和跟踪精度,这里采用离线模糊推理运算,制定模糊决策表,存入EPRO中,用查表法决定输出量。由于雷达罩天线座测量仪测量参数较多和测量环境的变化(如室外风载荷影响等),在一般场合下,依据原手动断续定点跟踪测量经验总结的知识库则常常具有很大的局限性,致使控制效果受到影响。为此,在反模糊化环节后面,又加入了自适应参数调节环节,以适应不同测量场合和控制过程的突变,提高跟踪效果。因此本文设计的闭环适应性模糊控制器的结构框图如图1所示。
 3.1精确量的模糊化
3.1精确量的模糊化
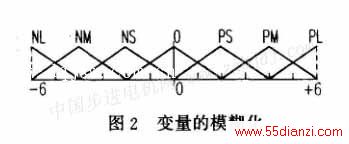
对反馈测量环节得到的方位、俯仰轴的角位移偏差和偏差变化率信号的精确值,首先进行模糊化处理。对于角位移偏差、偏差变化率和控制输出量分别可看作离散整数论域[-6,+6]上的语言变量E、E7和F,并对E、E7、F的语言变量值化分为:PL(正大)、PM(正中)、PS(正小)、O、NS(负小)、NM(负中)、NL(负大)7个档次,其隶属函数取三角分布,如图2所示。
 3.2模糊推理及决策表建立
3.2模糊推理及决策表建立
模糊推理就是根据一系列语言规则构成的模糊知识库,对输入变量进行推理,而获得控制量的过程,对于图1的模糊控制器结构,这里采取Mamdani推理法,并取如下模糊推理规则:

取i=0,1,2,…,7和j=0,1,2,…,7由式(1)产生7×7条控制规则,按照上述对语言变量的值档次的划分,其规则基如表1所示。

根据Mamdani推理法有A×B×C,其对应的模糊关系最为:
式(2)~(6)中,分别为模糊集合A、B、C、R的隶属度,且:

对于已知输入A、B,则输出C可用下式求得:
 3.3模糊量的精确化
3.3模糊量的精确化
按上述模糊推理获得的模糊控制量,还需进行精确化处理才能用于实际控制。对模糊量的精确化处理,本文采用工业控制中广泛应用的加权平均法:

按照上述推理,离线计算得出模糊决策表,存人计算机内存,在跟踪控制过程中靠查表法迅速得出控制量,从而大大提高了实时跟踪能力和跟踪精度。
3.4量化因子的适应性调节
由于雷达罩天线座跟踪测量仪测量参数较多,且既有静态测量又有动态测量,而上述决策表模糊推理知识库是在一个方向为零角度(零点位置)而另一方向上为-60度~+60度全行程范围内手动跟踪测量得出的经验总结,在其它场合下的参数测量时,模糊控制效果则不一定好,因此为使跟踪效果更好,在基本模糊控制器的基础上,又增加了输入、输出量化因子的适应性调节环节,以更好地适应各测量场合。
当偏差e或偏差变化率△P较大时,缩小K
1、K
2降低大偏差范围内的分辨率,以获得较平缓的控制特性,保证系统的稳定性;同时增大K
3提高快速性,改善系统的动态性能。
当偏差e或偏差变化率△P较小时,系统已接近稳态,则调节增大K
1、K
2,提高系统对小偏差的分辨率,提高控制的灵敏度;同时缩小K
3,以避免超调和振荡,使系统尽快进入稳态精度范围内。量化因子K
1、K
2、K
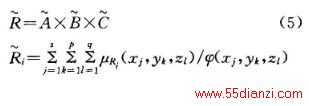
3的调节规律如图3所示。
图3中,1为两个输入量的量化曲线,其上各点的斜率为量化因子K
1、K
2的适应性调节规律,2为调节的恒定量化因子,3为输出量的量化曲线,其各点的斜率为K3的适应性调节规律。
4精密闭环步进驱动模糊控制系统硬件实现
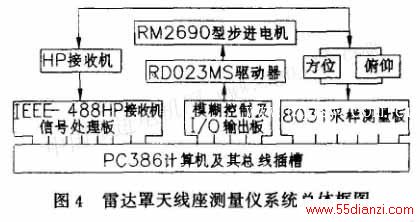
雷达罩天线座跟踪测量仪的方位、俯仰步进驱动系统均采用日本RORZE会司的产品,步进电机为RM2690,驱动器为400细分脉冲驱动型RD023MS。考虑跟踪测量仪测量参较多和后续数据的保存处理等工作,控制系统采用一台PC386,外扩PC总线标准的模糊控制I/O板、天线阵面位置测量板及HP接收机跟踪目标信号采样板构成。系统组成框图如图4所示。
[1] [2] 下一页
本文关键字:适应性 驱动电路及控制电路,单元电路 - 驱动电路及控制电路






