一、搭建机器人的机械结构
1.认识机械部件制作风车机器人所需的机械部件如下图所示。
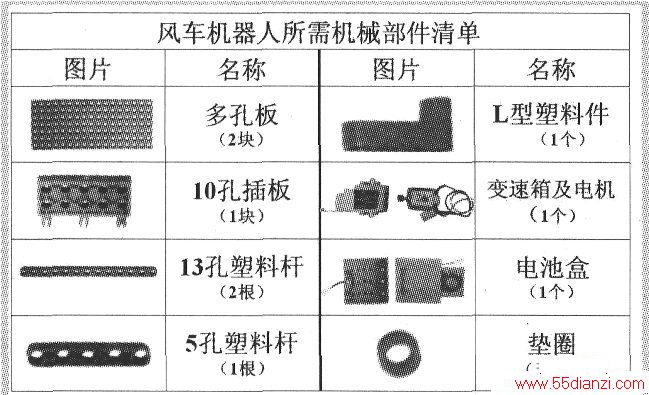
2.分析机械结构风车机器人机械结构大体由底座、支架、扇叶三部分组成。
3.动手制作过程
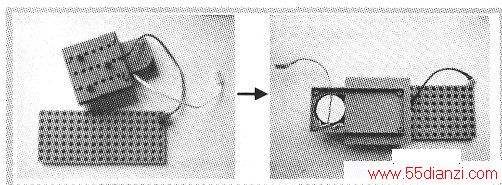
(1)制作底座底座由多孔板和电池盒组成。
我们利用电池盒下方的锁扣与多孔板连接如下图所示。
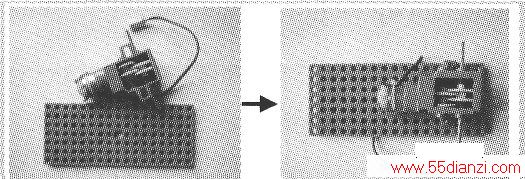
(2)制作支架支架由多孔板和电机变速箱组成。利用2根螺丝将它们固定,如下图所示。3
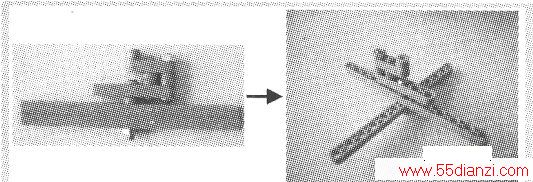
(3)制作扇叶扇叶主要由2根13孔塑料杆和一个L型塑料件组成。为了扇叶的中心对准变速箱输出轴,我们还使用了5孑L塑料杆和垫圈等部件进行辅助连接。连接后如下图。.
(4)连接三部分制作完毕,我们就可以动手连接了。
首先连接底座与支架。利用1块10孑L插板来进行连接。先利用螺丝螺母将插板固定在支架的一端。然后用插板上的锁扣将支架固定在底座上。如下图
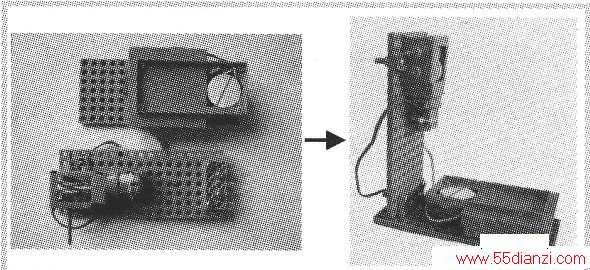
底座与支架连接后,就可以连接扇叶了。扇叶与支架是通过L型塑料件进行连接的。连接时注意:
长轮轴是六棱形的,L型塑料件的插孔也是六棱形的,我们要将边与边对好进行插接。如下图所示。
到此为止,风车机器人的机械结构就搭建完了。

二、连接机器人的电路结构
1.认识电路部件
风车机器人需要的电路部件有控制电路主板1块、电机驱动板1块和六芯连线1根。
先来介绍电路部件。
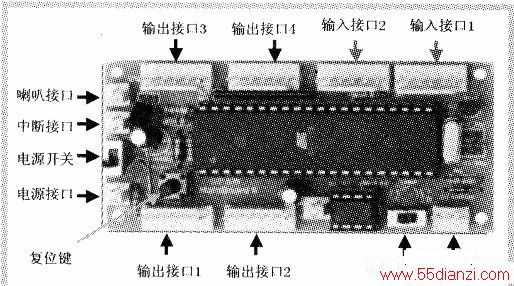
第一:控制电路主板(简称主板)主板是简易机器人的核心部分,相当于机器人的大脑。它主要负责加工处理输入的信息,并输出控制信息。
我们要熟悉每个接口的名称及位置。特别是要记清楚输入、输出接口的编号顺序如下图所示。
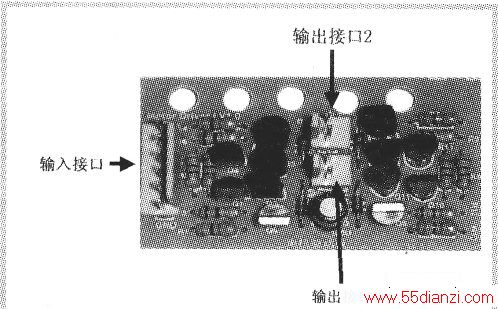
第二:电机驱动板在简易机器人中,通常电机不能直接与控制主板相连。这是因为主板上输出的信号较弱,不能直接带动电机。必须通过电机驱动板将信号增强后,驱动电机转动。
电机驱动板上有一个六针输入接口,主要负责接收从主板输出的控制信息,因此它一般与主板的输出接口相连,如下图所示。电机驱动板上还有两个两针输出接口,它们主要负责输出控制信息。一般与电机相连。
2.电路连接过程
第一步:用六芯连线将主板的输出接口1和电机驱动板的输入接口进行连接。连接时要注意插头与插座的吻合。
第二步,将电机引线连接到电机驱动板的输出接口1。
第三步,电源线连接到主板的电源接口。
第四步:扬声器引出线连接到主板的喇叭接口。
电路连接示意图如下图所示。
到此为止,我们就完成了风车机器人的电路连接。

3.运行自检程序
由于主板中预先装有自检程序,我们装上电池,通电检测。按下电源开关,这时扇叶转动,说明风车机器人的机械和电路工作正常。
4.编写下载程序
如果让机器人完成指定的任务,需编写相应程序。这里所使用的是中夏ll型图形化编程语言环境。
(1)准备材料编写程序之前,我们需要准备安装光盘和下载线。
(2)安装程序首先安装软件。将安装光盘放入光驱,则会自动运行并打开安装界面如下图所示。
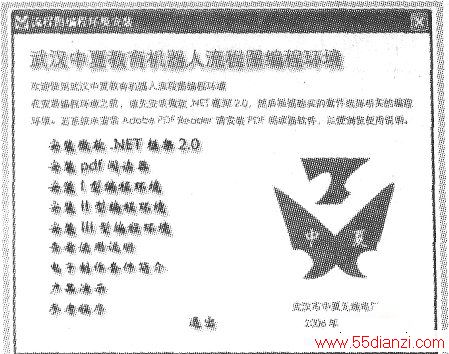
第一步:安装微软.NET框架2.0首先单击微软.NET框架2.O选项,会打开安装向导,跟着向导的提示我们一步步地进行安装。
第二步:安装中夏Il型软件环境安装完微软.NET框架2.0,再根据套件的版本安装相应的编程环境。这里我们单击安装ll型编程环境。
(3)介绍界面
启动软件如下图所示。软件界面大体分为四部分:功能命令区(也叫工具条)、命令库区、属性编辑区、程序区。
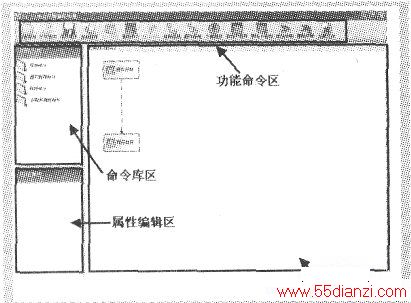
启动软件后,程序自动新建一个程序,名称为“新建流程图1”。新程序只有“程序开始”和“程序结束”两个图块,中间的连线,称为程序主线。
命令库给我们提供了四大类命令。分别是控制命令、循环跳转命令、跳转命令和子程序调用命令。
每一类命令中又包含多个命令。我们可以通过单击四大类的名称来展开与折叠其中的命令。
属性编辑区可以修改图框的属性。拖选一个命令到程序主线,会出现一个图框。单击选中这个图框,该图框被六个小方块包围,此时属性窗口显示该图框的属性,这时就可以修改该图框的属性。
(4)明确机器人的任务
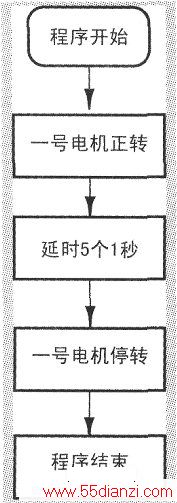
编程前我们需要明确为机器人指定的任务。在这里。我们为风车机器人确定一个任务:顺时针转5s,然后暂停2s,再逆时针转5s。
(5)编写测试程序
明确任务后,准备编程。由于电机有正反转之分,为了准确控制扇叶的旋转方向,我们需要编写一个程序进行测试。测试的内容是让电机正转5s,观察出扇叶的旋转方向。程序流程图如下图所示。
(6)下载测试程序
第一步:连接下载线:下载线的串口插头连接在计算机主机的串口插座上,另一端3针插头连接在主板的下载接口上。
第二步:打开电源开关,将运行开关调整到下载状态,此时下载指示灯亮,表示可以进行下载。
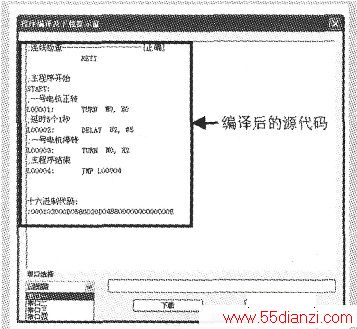
第三步:软件操作:单击功能命令区中的“下载程序“按钮。屏幕出现下载提示窗如下图所示。提示窗上半部分显示有图形化程序编译后的源代码,在窗口的左下角进行串口选择,在这里选择串口一、单击“下载”,进度条充满绿色后表示数据传输完毕,单击“退出”。单击下载时,我们注意到主板的下载指示灯会闪烁,同时听到蜂呜声,这表示下载成功。
上一篇:机器人战士的基本电路图






