此后
![]()
![]()
……
在有辅助电源的情况下,A值逐渐递减,直至软起动器重新起动,A值又开始递增;或辅助电源断开,A值清零。
为防止过载脱扣后,软起动器在短时内的再接通并在短时内再分断,可设置一定的恢复时间,以保证在恢复时间内,软起动器不得起动。
6 测量误差分析
对式(8)微分:
![]()
忽略Ar的测量和控制误差,取
dAr=0
由上式可得
![]() ,即
,即
![]()
转换为误差传递关系式:
![]() (15)
(15)
式(15)反映了延时测量相对误差与电流测量相对误差的关系。
令![]()
由式(15)
![]()
令![]()
则![]()
对应表1中的计算值tr,在表2中列出p和f的相应值。
表2 与表1中计算值tr对应的p和f值
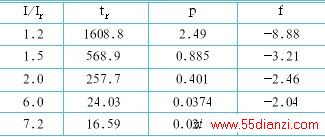
表2的误差传递系数f的估算值与表1的计算结果基本相符。
由表1及表2可以看出在较低过载倍数下由电流测量误差所引起的延时时间误差较大。
7 保护特性的斜率调节
7.1 建立数学模型
为了满足不同的配合需要,现在有的制造厂提供了改变长延时保护特性斜率的调节功能[2]或参照IEC 60255标准提供了不同数学模型的保护特性。为了实现保护特性的斜率调节,本文推荐两种数学模型并用的方案。
(1)基本数学模型






