则式(2)可变换为
![]() (6)
(6)
在τ0=0即A0=0时
![]() (7)
(7)
如要求在温升达到![]() 时断开电路,用智能脱扣器可按
时断开电路,用智能脱扣器可按![]() 进行整定,则
进行整定,则
![]() (8)
(8)
![]() (9)
(9)
 (10)
(10)
式(8)~(10)中tr为延时时间。
4 动作值和热时间常数的计算
4.1 动作值
设![]() 时
时![]()
由式(8)则
![]() (11)
(11)
![]()
因此![]() 为最大的不脱扣电流值。
为最大的不脱扣电流值。
设![]() =
= ![]()
按电动机起动器和断路器的要求,k2应分别小于1.2和1.3,为同时满足这两种要求,并留有裕度,可取k2=1.1~1.15。
由式(11)可取
![]() (12)
(12)
以K作为式(6)或(7)的截止值,当A≥K时控制器动作,实现长延时保护功能。
式(9)和(10)可转换为:
![]() (13)
(13)
 (14)
(14)
4.2 热时间常数的计算
在已知任意—N值下要求的tr值,即可计算T。
如:当N=6时,![]()
取k2=1.15,
由式(14)
 =641.2s
=641.2s
4.3 延时时间的计算
按式(13)计算在不同过载电流下的延时时间,并考虑电流测量误差的影响,计算结果见表1(计算时取T=642s)。
表1 不同过载电流下的延时时间的计算值
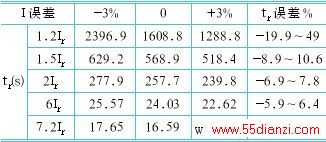
注:当![]() 时
时![]() 。
。
5 动作值的测量和计算
为测量智能脱扣器实态通电时的A值,可以采用数值积分的方法等间隔的测量电流和计算A值并与K值比较。
设测量间隔为Δt,并且初始温升为0,由式(6)和(7)
A0=0
![]()
![]()
……
![]()
![]()
上列各式中N可以为变量。
逐次计算,逐次与k比较,直至Ax≥k时控制器动作。则
![]()






