山东省电子设计大赛
( 2004 年)
参赛学校: 山东大学
指导教师: 万 鹏 姚福安
设计者: 刘永胜 杜 辉 杨媛媛
2004 年 9 月 13 号
摘 要
本系统采用单片机 AT89S52 为控制核心,实现电子秤的基本控制功能。系统的硬件部分包括最小系统板,数据采集、人机交互界面三大部分。最小系统部分主要是扩展了外部数据存储器,数据采集部分由压力传感器、信号的前级处理和 A/D 转换部分组成。人机界面部分为键盘输入 , 128 ![]() 300)this.width=300" border=0>64 点阵式液晶显示,可以直观的显示中文,使用方便。
300)this.width=300" border=0>64 点阵式液晶显示,可以直观的显示中文,使用方便。
软件部分应用单片机 C 语言实现了本设计的全部控制功能,包括基本的称重功能,和发挥部分的显示购物清单的功能,可以设置日期和重新设定 10 种商品的单价,具有超重报警功能,由于系统资源丰富,还可以方便的扩展其应用
第一部分: 方案论证与比较
一、控制器部分
本系统基于 51系列单片机来实现,因为系统需要大量的控制液晶显示和键盘。不宜采用大规模可编程逻辑器件:CPLD、FPGA来实现。(因为大规模可编程逻辑器件一般是使用状态机方式来实现,即所解决的问题都是规则的有限状态转换问题。本系统状态较多,难度较大。)另外系统没有其它高标准的要求,我们最终选择了AT89S52通用的比较普通单片机来实现系统设计。内部带有8KB的程序存储器,在外面扩展了32K数据存储器,以满足系统要求。
二、数据采集部分
( 1 )、传感器
题目要求称重范围 9.999Kg ,重量误差不大于 ![]() 300)this.width=300" border=0>Kg ,考虑到秤台自重、振动和冲击分量,还要避免超重损坏传感器,所以传感器量程必须大于额定称重―
300)this.width=300" border=0>Kg ,考虑到秤台自重、振动和冲击分量,还要避免超重损坏传感器,所以传感器量程必须大于额定称重―  300)this.width=300" border=0>。我们选择的是 L-PSIII 型传感器,量程 20Kg ,精度为
300)this.width=300" border=0>。我们选择的是 L-PSIII 型传感器,量程 20Kg ,精度为 ![]() 300)this.width=300" border=0>,满量程时误差
300)this.width=300" border=0>,满量程时误差 ![]() 300)this.width=300" border=0>0.002Kg 。可以满足本系统的精度要求。其原理如下图所示:
300)this.width=300" border=0>0.002Kg 。可以满足本系统的精度要求。其原理如下图所示:
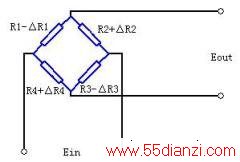
称重传感器主要由弹性体、电阻应变片电缆线等组成,内部线路采用惠更斯电桥,当弹性体承受载荷产生变形时,输出信号电压可由下式给出:

( 2 )、前级放大器部分
压力传感器输出的电压信号为毫伏级,所以对运算放大器要求很高。 我们考虑可以采用以下几种方案可以采用:
方案 一 、利用普通低温漂运算放大器构成多级放大器。
普通低温漂运算放大器构成多级放大器会引入大量噪声。由于 A/D 转换器需要很高的精度,所以几毫伏的干扰信号就会直接影响最后的测量精度。所以,此中方案不宜采用。
方案二、由高精度低漂移运算放大器构成差动放大器。
差动放大器具有高输入阻抗,增益高的特点,可以利用普通运放 ( 如 OP07) 做成一个差动放大器。

电阻 R1 、 R2 电容 C1 、 C2 、 C3 、 C4 用于滤除前级的噪声, C1 、 C2 为普通小电容,可以滤除高频干扰, C3 、 C4 为大的电解电容,主要用于滤除低频噪声。
优点:输入级加入射随放大器,增大了输入阻抗,中间级为差动放大电路,滑动变阻器 R6 可以调节输出零点,最后一级可以用于微调放大倍数,使输出满足满量程要求。输出级为反向放大器,所以输出电阻不是很大,比较符合应用要求。
缺点:此电路要求 R3 、 R4 相等,误差将会影响输出精度,难度较大。实际测量,每一级运放都会引入较大噪声。对精度影响较大。
方案 三 :采用专用仪表放大器,如: INA126,INA121等。
此类芯片内部采用差动输入,共模抑制比高,差模输入阻抗大,增益高,精度也非常好,且外部接口简单。
以 INA126为例,接口如下图所示:

放大器增益  300)this.width=300" border=0>,通过改变
300)this.width=300" border=0>,通过改变 ![]() 300)this.width=300" border=0>的大小来改变放大器的增益。
300)this.width=300" border=0>的大小来改变放大器的增益。
基于以上分析,我们决定采用制作方便而且精度很好的专用仪表放大器 INA126 。
( 3 )、 A/D 转换器
由上面对传感器量程和精度的分析可知: A/D 转换器误差应在 ![]() 300)this.width=300" border=0>以下
300)this.width=300" border=0>以下
12 位 A/D 精度: 10Kg/4096=2.44g
14 位 A/D 精度: 10Kg/16384=0.61g
考虑到其他部分所带来的干扰 ,12 位 A/D 无法满足系统精度要求。 所以我们需要选择 14位或者精度更高的A/D。
方案一、逐次逼近型 A/D转换器,如:ADS7805、ADS7804等。
逐次逼近型 A/D转换,一般具有采样/保持功能。采样频率高, 功耗比较低,是理想的高速、高精度、省电型 A/D 转换器件。
高精度逐次逼近型 A/D转换器一般都带有内部基准源和内部时钟,基于89C52构成的系统设计时仅需要外接几个电阻、电容。
但考虑到所转换的信号为一慢变信号,逐次逼近型 A/D转换器的快速的优点不能很好的发挥,且根据系统的要求,14位AD足以满足精度要求,太高的精度就反而浪费了系统资源。所以此方案并不是理想的选择。
方案二、双积分型 A/D转换器:如:ICL7135、ICL7109等。
双积分型 A/D转换器精度高,但速度较慢(如:ICL7135),具有精确的差分输入,输入阻抗高(大于 ![]()
本文关键字:电子秤 工具,电子知识资料 - 工具






