其他3个读写函数实现过程类似,这几个函数是数据写入读出的函数接口,方便应用层实现调用。
6 云台电机控制应用程序设计
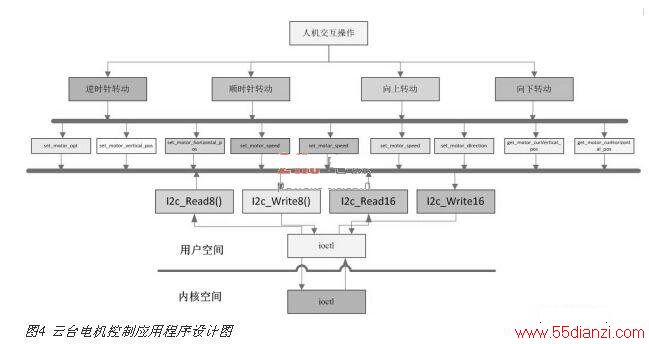
云台很重要部分是电机转动控制,本课题研究采用图像界面实现人机交互,其中界面设计采用QT图形界面软件来设计,可以在界面操作实现电机的水平转动、垂直转动,逆时针转动和顺时针转动,从而带动视频监控的摄像头朝不同方位转动以及定位,如图所示。根据协议,应用程序设计主要实现以下操作:
(1)获取当前的垂直位置,函数接口为get_motor_curVertICal_ptr (),返回垂直位置值;
(2)获取当前的水平位置,函数接口为get_motor_curHorizontal_ptr (),返回水平位置值;
(3)设置垂直运行的停止位置,函数接口为set_motor_vertical_ptr (unsigned short ptr),参数ptr为设置的垂直停止位置值;
(4)设置水平运行的停止位置,函数接口为set_motor_horizontal_ptr (unsigned short ptr)参数ptr为设置的水平停止位置值;
(5)水平操作和垂直操作的启动操作,接口函数为set_motor_opt(bool bVertical, bool bHorizontal) ,参数bVertical表示是否启动垂直操作,bHorizontal表示是否启动水平操作
(6)设置运行速度,函数接口为set_motor_speed(unsigned char vertical_speed, unsigned char horizontal_speed),参数vertical_speed控制垂直方向速度值,horizontal_speed控制水平方向速度值;
(7)设置电机运行方向,接口函数set_motor_direction(bool bVertical, bool bHorizontal) ,设置运行方向为顺时针或者逆时针,参数bVertical为真表示垂直方向向上运动,为假表示向下运动;bHorizontal为真,表示水平方向逆时针,否则为顺时针。
下面通过运动速度的接口函数set_motor_speed(),详细介绍云台控制接口函数的实现过程,电机转动速度设置函数设置set_motor_speed(),其中函数参数vertical_speed为垂直方向运动速度;horizontal_speed为水平方向运动速度,局部变量reg用于制定控制类型,value设计为16位,其中高8位存放垂直转动速度数值命令,低8为存放水平转动速度数值,参数设置完后调用I2c_Write16()函数,从而调用ioctl实现对驱动的调用,最终通过I2C总线控制电机,达到电机快速转动、定位准确。
set_motor_speed(unsigned char vertical_speed, unsigned char horizontal_speed) {
int ret;
unsigned char reg;
unsigned short value=0;
reg = 3;
value = vertical_speed<<8;
value |= horizontal_speed;
ret = I2c_Write16 (fd, ?, &value);
if (ret != 0)
printf("set_motor_speed error");
return ret;
}
通过实现人机交互操作程序,实现电机的向上转动、向下转动,逆时针转动和顺时针转动,通过调用各种操作的接口函数,实现对I2C应用程序的调用,最用通过ioctl实现对电机的控制,从而带动视频监控的摄像头朝不同方位转动以及定位,具体实现如图4所示。
7 结束语
本系统设计实现了一款基于TMS320DM368的高清视频监控系统中的云台电机控制设计,完成了i2c驱动程序的分析以及设计,并且完成了i2c应用程序的设计和云台电机控制应用程序设计,达到了应用目的,取得了良好效果。
上一篇:电动机自锁控制原理






