一次完整的发动机运行可分为如图6所示的几个阶段。控制任务按这些阶段循环进行,任一阶段内出现异常状况,任务都进入停车状态。具体阶段为:
(1)待命阶段。发动机的状态满足运行要求,等待以PCM码方式输入的启动命令。规定以大车指令对应的脉宽为启动命令。
(2)点火阶段。电机转速在设定的上下限内波动,助燃丁烷气阀打开,向发动机体内注入易燃气,同时开启点火器对气体加热,当气体点燃使尾喷管温度升高到设定值时,认为点火成功。
(3)着车阶段。油泵开始工作,供油量逐渐增大,点火器、气阀、启动电机先后关闭,发动机转速开始加速。当转速和温度均超过设定值时,认为着车成功。
(4)热车阶段。发动机成功着车之后,不宜立即投入工作,需在慢车(怠速)状态下持续运行一段时间。
(5)正常运行阶段。PID控制算法投入运行。
(6)停车阶段。油泵停止运行,启动电机会根据温度间歇性地开启,在有利于发动机散热的条件下,尽可能地节省电能。

3 控制律设计
按控制内容划分,微型涡喷发动机的控制项目分为以下几类:
(1)过程控制。使发动机迅速、稳定、可靠地完成过渡工作状态,包括启动控制、加速控制、减速控制。启动控制保证发动机正常点火和顺利启动。加速控制的目的是在发动机不超温的前提下,改变供油量,使加速时间尽可能缩短。减速控制使收油门时减油不致过猛,防止燃烧室贫油熄火。
(2)推力控制。目的是给发动机提供所需的推力。飞行器空中飞行时发动机推力不易直接测量,但发动机转速能够表征发动机的推力,故通过转速控制实现推力控制。
(3)安全控制。目的是保证发动机安全、可靠地工作。包括超温保护、超速保护、电池电压欠压保护等。
3.1 启动控制
启动时间越短越好,因而发动机增速要快。简单地提高供油量虽然可以提高发动机的增速,但容易因过度“富油”而超温。“富油”现象是指当供油量增速过快时,由于发动机的惯性大于油泵的惯性,使发动机转速增量相对落后,吸入空气相对油量不足,以致燃油燃烧不充分,严重时,发动机体内的温度会急剧上升,尾气中会出现火苗,这种现象对发动机极为有害。为减轻“富油”现象,在着车过程控制中引入温度和升温速度反馈。当温度超过警戒值或者升温速度超过警戒值时,供油量将停止增加。
3.2 转速控制
转速控制采用工程上常用的位置式数字PID控制算法。对本系统而言,控制量为油泵的PWM占空比。占空比为负值是没有物理意义的,需在PID的输出之上加入工作点,使输出在工作点上下调整。转速控制框图如图7所示。
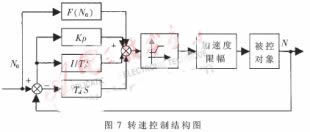
其中,F(N0)为工作点产生函数,表示指令转速N对应的占空比参考值,即工作点,通过试验来获取,软件实现时采用查表法和线性插值法。限幅环节保证油泵占空比既不会小于怠速时的占空比,以避免熄火;也不会大于设定的最大值,以避免过速危险。油门加速度限幅环节一方面限制了加油速度,防止因加油过快而超温;另一方面限制了收油速度,防止因收油过快而贫油熄火。油门加速度限幅简单地实现了加速控制和减速控制。
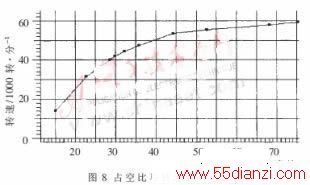
由于油泵占空比与发动机转速间的非线性关系(如图8所示),采用了分段PID方法,即不同阶段采用不同的PID参数。单就Kp而言,由图可看出:在低转速段,曲线的斜率较陡,转速对占空比的变化敏感,Kp取值较小,避免了超调过大和振荡;而在高转速段,曲线上升非常平缓,Kp取较大值,以提高响应速度。同样地,为取得较好的性能,Ki、Kd在不同的转速段也应取不同的值。在本系统中共分为三段。
4 系统测试
本系统已进行了多次台架试验。试验中,被控对象选用国产500牛推力的某型涡喷发动机,原始数据利用运行于PC机平台上的ECU V1.0通过串行口获得。
4.1 检测软件ECU V1.0
为便于系统调试和测试,自行开发了软件ECU V1.0。它能将发动机各种参数实时记录下来,以曲线方式动态地显示出来,以便分析各个参量间的相关性,并具有发送控制命令、报警等辅助功能。图8、图9均由该软件生成。
4.2 测试结果
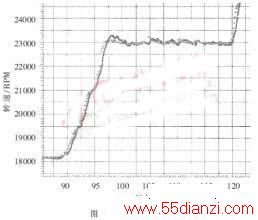
试验表明,在控制系统的作用下,发动机能很好地跟踪转速遥控指令。图9给出一次由18000RPM至 23000RPM的推杆操作中指令和转速的曲线,图中虚线为指令,实线为速度,两条曲线基本吻合。
微型涡喷发动机控制系统在我国还是一个较新的领域,笔者在此方面作了较为深入的探索。试验中控制系统能可靠稳定地工作,达到了工程样机的水平。
上一篇:直流电机绕组线端的标志方法






