本文介绍了户用型光伏并网发电的优点。指出在双级式并网逆变器的Boost电路中,控制算法应当完成升压控制和最大功率追踪(Maximum Power Point Tracking,MPPT),对这两种控制策略进行了详细研究。此外,对MPPT应用时的两个实际问题最大功率限制输出以及逆运行也进行了讨论。最后在Simulink中建立了仿真模型,仿真结果表明Boost控制算法具有可行性。
在光伏并网系统中,由于户用型光伏发电技术可以克服日照分散性缺点,且在电网终端并网,所发出电能被负载就地消耗,减小了电能在传输过程中造成的损失。这样在灵活性和经济性上,都比光伏电站具有更大优势。在户用型并网逆变器中,双级式并网逆变器由于其体积小、质量轻、效率高且成本较低等优点,具有广阔的发展潜力。
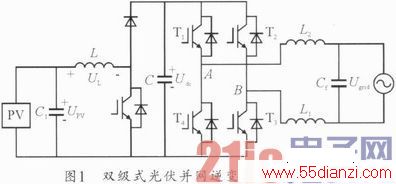
在双级式并网逆变器中,拓扑结构主要包括Boost和全桥逆变器电路。如图1所示。本文主要对Boost电路进行详细算法分析。
1 Boost控制算法研究
Boost要完成两个任务。一就是在启动的时候,若太阳电池板电压小于母线额定电压时,Boost电路应能完成升压,使母线电压达到并网要求;另外,就是要完成太阳能电池板的最大功率追踪。下面分别对其进行研究。
1.1 Boost电路软充电控制算法
Boost电路由于在系统中属空载运行,对其实行软充电。软充电方式可以保证Boost在母线电压比较低的时候快速充电,而在快要接近母线电压的时候,放慢充电速度,减小母线电压过冲。
软充电方式控制流程,假设母线电压额定值为400 V。在程序执行的时候,先判断母线电压是否超过额定电压400 V,若否则开始充电控制。通过SoC判断当前电压是否接近额定值,若SoC<0.9,则表示当前电压值远小于额定电压,加速充电,若否表示当前电压已接近额定电压,则开始减速充电。
1.2 Boost电路MPPT控制算法
太阳能并网逆变器中,要充分发挥光伏电池板的效能应保证电池板随时最大功率输出。在双级式并网逆变器中,通常由Boost电路来完成MPPT控制。MPPT控制和光伏电池板特性有很大关系,在辐照度和温度变化时电池板的P—U曲线详图略。
根据电路最大功率传输定理,当电池板的内阻抗与负载阻抗相匹配时,电池板有最大功率输出。由于在实际中,光伏电池板内阻抗随着环境的变化而变换,由此可知MPPT过程实际上是寻找一个与内阻抗匹配的负载阻抗的过程。
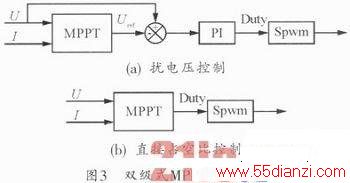
在MPPT控制中,主要的问题是系统的扰动量。在单级式并网逆变器中,经常通过扰动PV电压来实现MPPT。具体如图2所示,即当电压值U大于Uref时,通过增大输出电流米降低当前电压。这样通过控制输出电流大小就实现电压U的控制,从而完成MPPT。

在双级式并网逆变器巾Boost电路的输出电压Uout通常为恒定值,则根据公式U=Uout(1-D),可知占空比的变化会引起输入电压U发生改变。所以若当前电压U大于MPPT给定的参考电压,则占空比增加,从而可使得U减小,完成MPPT控制。由于PI控制器存在积分环节,MPPT的速度以及系统超调都会受到PI控制器的影响。所以在双级式并网逆变器中,通常采用直接扰动占空比来实现MPPT。具体如图3所示。
(1)定电压跟踪法(CVT)
当太阳辐射变化时,最大功率点电压近似分布在一条垂直的直线上。电池板最大功率点电压与开路电压存在比例关系,通常取开路电压的0.78倍。这样,将电池板开路电压采集后,即可知道最大功率点电压。若能将Upv控制在最大功率点电压附近,则可近似最大功率输出。具体流程图略。
CVT法简单、有效,能迅速的靠近最大功率点。但是,CVT忽视了温度对电池板最大功率点的影响。当温度变化很大的时候,跟踪最大功率点效果不理想。
(2)扰动观察法(P&O)
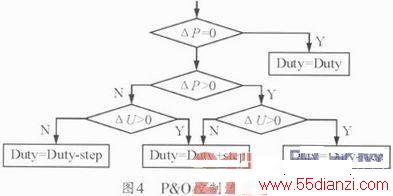
根据太阳能电池板功率曲线,当电池板工作在最大功率点,以及最大功率点两侧时,dp/dU符号不一致。若dp/dU<0,则在最大功率点右边,需要减小U来靠近最大功率点;若dp/dU>0,则在最大功率点左边,需要增加U来靠近最大功率点。变化特征详图略。
P&O法利用功率作为判断,具有控制思路清晰,实现方便。在外界环境变化的时候也能够跟踪到电池板最大功率点,工程上一般常采用。尽管如此,P&O法还是存在一些缺点比如在稳态的时候,一直在最大功率点附近来回震荡,震荡大小可通过步长来进行调节。控制流程如图4所示。
(3) MPPT算法的两个实际问题
MPPT算法除了用于寻找最大功率点外,在实际系统中还应该注意一些应用问题。比如最大功率限制输出以及逆变器降额运行等。
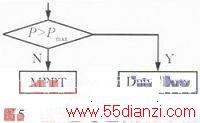
最大功率限制输出,在实际使用中,要求并网逆变器在发现在输出功率超过额定容量时,应能够保证MPPT不再继续找最大功率点保持当前输出。最大输出的处理方法简单,只需要每次在进行MPPT前对当前功率进行判断。若已超过Pmax,则保持Dutv即可,否则继续寻找最大功率点。如图5所示。
逆变器降额运行,当逆变器由于天气炎热,系统满功率运行。当模块环境温度超过其本身警戒,要求逆变器降额运行。此时MPPT不再以找最大功率点为目标,而要求能够降低逆变器输入功率到给定功率指令值。此时,要求MPPT算法应能够朝功率减小的方向运行,只需要在前面P&O法基础上稍作改进即可实现其逆运行。
2 仿真分析
分别对Boost充电控制、MPPT控制在Matlab/Simulink中建立仿真模型,对本文所提出的控制算法进行验证。
2.1 直流源方案仿真设计
由于实验室没有模拟太阳能电池板的直流源,且直流源价格昂贵。在直流电压源串电阻可以有效模拟PV曲线。根据最大功率传输定理,在电压源有最大功率输出时,输出负载R1=Rin。模拟电路如图6所示。
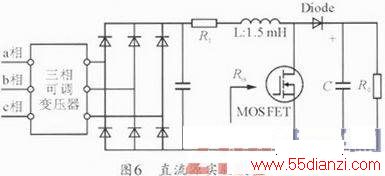
当boost电路的负载Ro一定时,那么其输入电阻Rin=Ro(1-D)2,boost要想有最大功率输出,则其输入电阻Rin一定要等于限流电阻R1。假设串10Ω的功率电阻,则直流电压在400 V和600 V时,直流源的P—U曲线如图7所示。
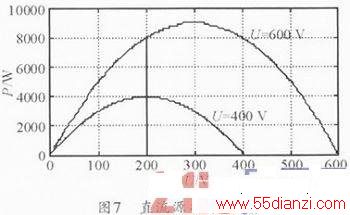
由功率曲线可知,当U=400 V,最大输出功率为4000 W,此时对应电压为开路电压一半200 V,与理论分析相符;当U=600 V,最大输出功率为9000 W,此时对应电压为开路电压一半300 V。
2.2 MPPT仿真分析
(1)基本MPPT仿真分析
仿真时电压源设置为400 V,电阻串联10 Ω。则由前面功率曲线可知最大功率为4000 W,电压源在0.05 s发生突变到600 V,则此时最大功率点输出为9000 W。根据以上分析当电压突变,MPPT采用CVT和P&O时,电路输出功率波形如图8和图9所示。

本文关键字:逆变器 不间断电源-逆变器技术,电源动力技术 - 不间断电源-逆变器技术






