BY-5064是一款小型化、高细分、多功能、使用方便的两相混合式步进电机驱动芯片,配合简单的外围电路即可实现高性能的驱动电路。该芯片提供64细分,采用SOP-28封装,外接功放电路可实现驱动电流高达10A。
应用电路及其设计
1.小信号处理部分
x下图所示是BY-5064电机驱动器小信号处理部分的应用电路图,其设计思路如下。
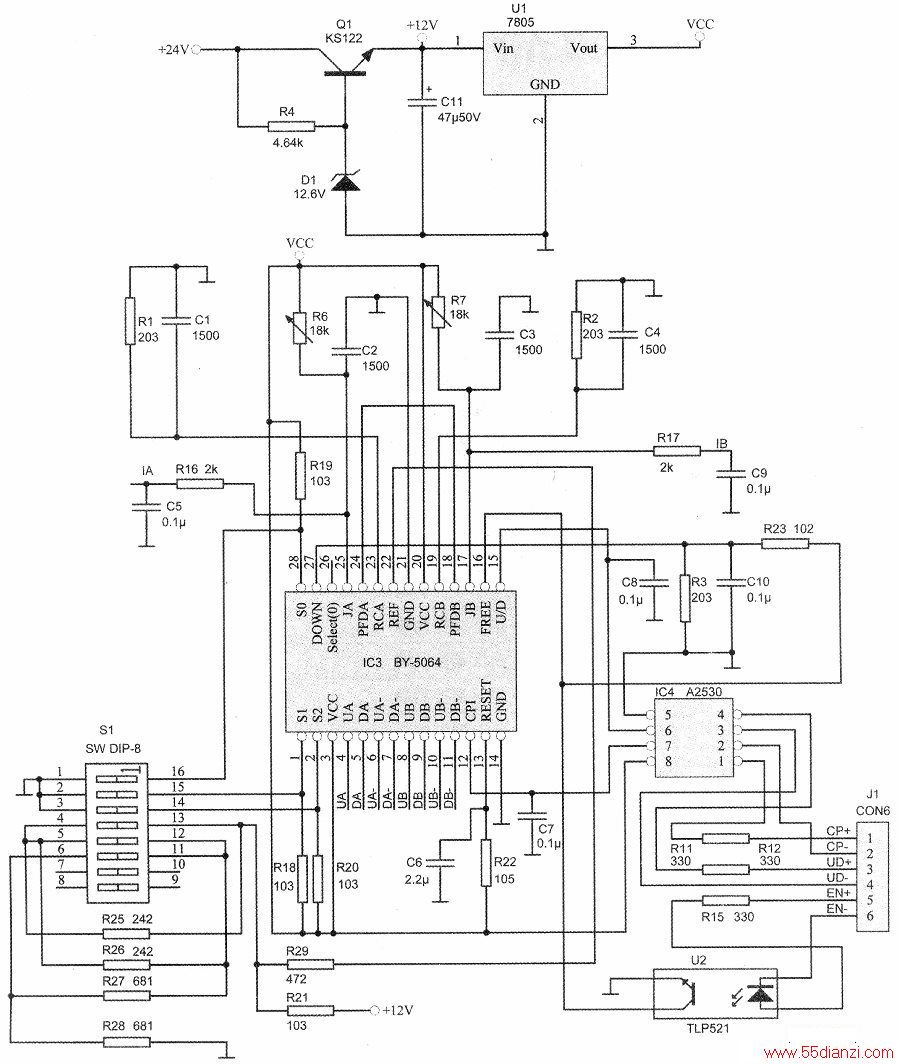
BY-5064最高能提供64细分,由芯片的28、1、2脚电平决定细分数,如下表所示。这三个脚的电平由拨码开关控制,当某个开关拨到ON位置,则此脚接地,电平为零,反之被上拉电阻拉到高电平。
BY-5064的13脚是此芯片的复位端,可以用专用复位芯片如CM02来控制,也可以用本图中简单的电阻、电容器件组成。BY-5064的12脚是脉冲输入端,每来一个脉冲,步进电机走一小步,具体步长与细分有关,来自外部处理器或信号发生器的方波脉冲CP+、CP-通过6针插头J1的1、2脚,经过快速光耦A2530隔离后由7脚输出加到BY-5064的12脚。BY-5064的15脚(U/D)是正、反转控制端。U/D=1时,正转;U/D=0时反转。内部已含有施密特触发器。来自外部处理器或波段开关控制的电机旋转方向信号UD+、UD-通过6针插头J1的3、4脚,流精确检测端,对检测电阻及RC滤波电路的参数有非常精确的要求(如1%。精度),并且与R、C的比例有关。一般情况下,我们使用的元件不能达到要求,从而会引起芯片内部运算放大器的失调,造成控制波形,尤其是细分状态下的阶梯波的波形偏移。此时电机会出现步矩不均匀,噪音大等现象。解决这一问题的方法是:先固定检测电阻及滤波电路中R、C的值,不必考虑精度,把这部分当作整体输入,这时只需调节上拉电阻R6,R7,用示波器监视电阻上的波形(即芯片内部已设定的的波形)调至标准的正弦波即可。
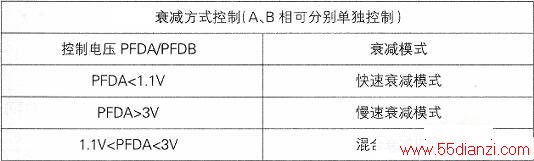
BY-5064的24脚PFDA和18脚PFDB为衰减方式控制端。上表为衰减方式控制(A、B相可分别单独控制),一般建议为:细分状态下用快衰减方式,即设定PFDB=O,PFDA=O。此时电机细分步矩均匀,运行平稳。否则振动较明显。不细分(即1/2步)时,建议用慢衰减方式,此时电机发热小,无噪音。本电路设计为BY—5064的24脚和18脚接地,即采用快衰减方式。
BY-5064的23脚RCA和19脚RCB为斩波时间调整端。典型应用为:R1=20K至40KC1=1500P:R2=20K至40KC4=1500P此R、C参数决定斩波频率,一般建议为:细分状态下(即快衰减方式下),R1=R2=20K,C1=C4=1500P。不细分状态下(即慢衰减方式下),R1=R2=33K,C1=C4=1500P。
BY-5064的22脚为电流设定端,此端电位设定的大小直接决定驱动H桥电流的大小,也即驱动器的输出功率。12V电压经过电阻R21和拨码开关S1的4、5、6端及R28分压,电阻R25、R26、R27根据拨码开关4、5、6拨在不同位置加入分压电路,得到不同的电压,经过R29加到BY-5064的22脚,通过拨码开关4、5、6得到我们需要的驱动器输出电流。
2.功率放大电路
下图所示是BY-5064电机驱动器功率放大电路图。
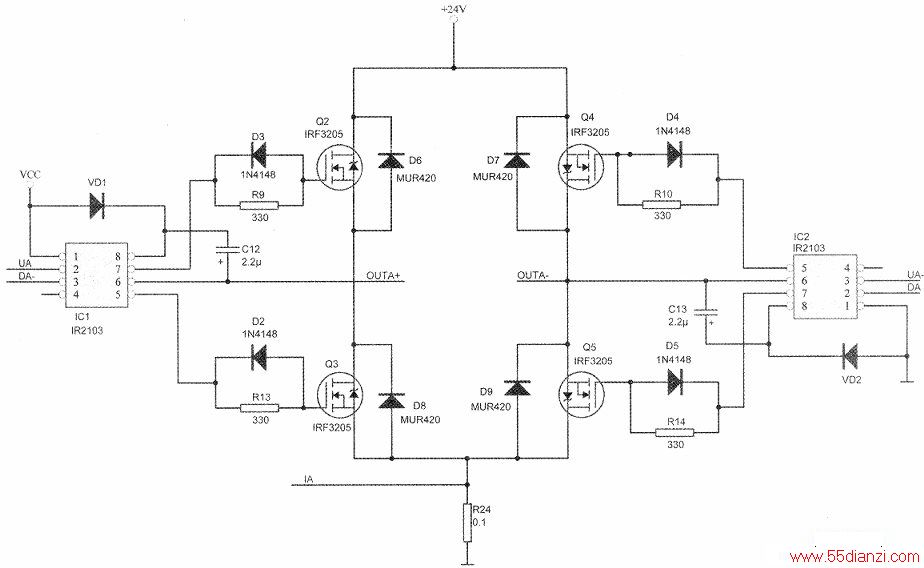
BY-5064的4—11脚是A、B相H桥控制端,为环形分配器输出端,分别控制驱动电路的相序,A、B相驱动完全一致,我们以A相分析为例,UA、DA-输出信号加到MOS管驱动芯片lCl(IR2103)的2、3脚,DA、UA-输出信号加到MOS管驱动芯片IC2(IR2103)的2、3脚。7、5脚是脉冲放大输出端,放大了来自2、3脚的小信号脉冲,达到推动MOS管的目的,IR2103内部是2个同相放大器,输出信号和输入信号波形一致,输出幅度变高。经过驱动放大的信号推动四个MOS管组成的H桥式放大电路,得到步进电机所需的A相信号OUT+、OUT-,流过检测电阻R24上的检测电流变成电压,通过电阻R17加到BY-5064的17脚A相电流采样控制端。B相原理和此一样,不再赘述。
结语
BY-5064芯片由北京博远鼎盛电子科技有限公司研发生产,性能稳定可靠,用此芯片研发的驱动器产品运行平稳、低振动、低噪音。驱动器体积小,成本低。经过快速光耦A2530隔离后由6脚输出加到BY-5064的15脚。BY-5064的16脚FREE是脱机端,也称使能端,低电平有效。FREE=1时,芯片正常工作:FREE=O时,芯片输出全部为零。不用此功能时,此端可直接接VCC。来自外部处理器或波段开关控制的电机使能信号EN+、EN-通过6针插头J1的5、6脚,经过普通光耦TLP521隔离后加到BY-5064的16脚。使用时一般将CP+、UD+、EN+接在一起,接电源VCC(+5V)。CP-、UD-、EN-接控制信号的输入。
BY-5064的25脚JA和17脚JB分别为A、B相电流采样控制端,典型应用为:检测电阻一般为0.12欧至0.20欧滤波参数为R=2K,C=1500P。(R16=2K,C2=1500P:R17=2K,C3=1500Po)上拉电阻为18K左右,必须注意的是,此端为电






