关键词: 全数字; PMSM; 矢量控制; SVPWM
Design of PMSM Digital Servo System
AN Jiao , HU Xiehe , HU Haiyan
Abstract: A PMSM digital servo system based on DSP TMS320LF2407, CPLD and IPM was introduced. Field-oriented Control( FOC) method and Voltage Space Vector PulseWidthModulation method were adop ted in the system. The Experimental result veri2fies that the fast responding and accuracymeet the industrial needs.
Keywords: Digital; PMSM; FOC; SVPWM
0 前言
随着计算机技术、电子技术、通讯技术、控制技术的快速提高, 采用全数字控制的永磁同步电机伺服系统已逐步取代传统的步进伺服、直流伺服及采用模拟控制的交流伺服系统, 成为当代伺服控制的主流,被广泛应用于高精度数控机床、机器人、特种加工装备和精细进给系统中[ 1 ]。
本文作者采用TI公司专用于电机控制的DSP芯片TMS320LF2407, 以软件方式实现矢量变换控制电流环、速度环及位置环的PID实时跟踪技术; 采用三菱公司的智能功率模块IPM 作为功率变换装置;加上简便的操作面板及其它必要的外围电路构成了一套完整的永磁同步电机全数字交流伺服系统。
1 系统设计指标
以DSP为核心的全数字交流伺服系统主要技术指标如下:
(1) 指令输入模式: 脉冲列输入方式、数字输入方式、模拟输入方式;
(2) 工作模式: 位置、速度、转矩控制方式;
(3) 调速比: 1∶5 000;
(4) 响应时间≤20ms;
(5 ) 最高转速: 3 000 r /min, 回转定位精度1 /10 000 r;
(6) 保护: 过电流、过电压、欠电压、电机失速、堵转、过载、位置超差等自动保护。
2 调节器设计
交流伺服系统采用位置环、速度环、电流环控制[ 2 ]来保证伺服系统的高性能和高可靠性。伺服系统中所有的控制运算都是由DSP完成的。电流调节是通过调整电枢电流, 即调整IGBT占空比来实现的。电枢电流与IGBT 占空比的关系为[ 3 ]
其中: I0 为平均负载输出电流;
D为斩波器占空比;
R 为电枢电阻;
E为电机反电势;
Ud 为直流电压。
DSP片内的三相PWM电路能够很方便地产生所需的IGBT占空比调制信号[ 4 ] , 它可以通过软件设置PWM的开关频率、死区时间、最小脉冲宽度和补偿时间等来实现。IGBT占空比调节流程图如图1所示。

图1 IGBT占空比调节流程图
3 系统硬件设计方案
系统设计基于TI公司的TMS320LF2407 (DSP) ,是专为电机控制而推出的一代微控制器, 它具有高性能的C2XLP内核, 采用改进的哈佛结构, 四级流水线操作, 片内集成的事件管理器EVA、EVB各包括3个独立的双向定时器, 支持产生可编程死区的PWM输出; 4个捕获口中的两个可以直接连接来自光电编码器的正交编码脉冲; 两个独立的10位八路A /D转换器可同时并行完成两个模拟输入的转换, 片内集成的串行通讯接口( SCI) 及串行外设接口( SPI) 可用于与上位机、外设和多处理器之间的通讯。40 个可独立编程的复用I/O口可以选配成键盘输入和示波器显示的输入输出口。TMS320LF2407的这些性能为电机控制提供了可行的解决方案。
3.1 系统板设计
伺服驱动器系统板主要由DSP最小系统、位置、速度检测环节、电流检测环节、通讯模块等组成。
TMS320LF2407 最小系统由DSP 芯片、313V 电源、20MHZ晶振、外扩64K静态RAM和外扩接线引脚组成。系统通过JTAG接口可以和仿真器连接, 进行在线调试。
采用复合式增量光电编码器作为位置检测装置,其输出为6路信号, 其中两路为正交的A、B脉冲信号, 一路为零位检测脉冲信号Z, 另三路为相差120°的霍尔位置信号U、V、W, 从而很好地解决了增量式光电编码器不能提供初始绝对位置这一问题。三路霍尔可以有6个状态, 每个状态表示60°电角度, 则当系统上电时, 三路霍尔信号可以提供转子所在60°的位置区间。为了减小误差, 取每个位置中间值作为转子的初始位置, 这样, 在电机起动时, 导通角与实际转子位置最多有30°电角度的误差。经过理论分析和实验证明, 在最坏的情况下, 电机能够产生足够的转矩起动。
正常工作时, 对正交的A、B脉冲信号进行累积计算, 可以得到转子的相对角位移。电机速度的计算通过求单位时间位置变化量而求得。采用4倍频的方法以提高光电码盘的定位精度。TMS320F2407的事件管理模块中的正交脉冲编码(QEP) 电路可以对增量式光电码盘产生的两路脉冲信号进行4倍频译码和计算[ 4 ] , 从而实现读取处于转动工作状态下的电机转子位置和转速信息。编码器信号A、B经由CPLD进行去噪处理后直接接到DSP的QEP1、QEP2引脚。
采用变比1∶1 000的霍尔元件检测主回路电流信号。TMS320LF2407内部有两个10位的A /D转换器,每一个可以接8 路模拟信号。TMS320LF2407 的A /D输入信号范围为0~5V, 先将霍尔输出的小电流信号变换为电压信号, 再经放大滤波后进入DSP内部的A /D通道进行反馈控制。只需检测两路电流信号即可对电机电流进行控制[ 4 ]。
伺服驱动传统的模拟量控制接口, 容易受到外部信号干扰, 传输距离短。我国目前伺服驱动装置上大量采用的脉冲式控制接口, 也不是真正意义上的数字接口。这种接口受脉冲频率的限制, 不能满足高速、高精控制的要求。TMS320F2407A 包含了高速C2XXDSP CPU内核及SCI通信模块, 为实时通信提供了方便。本系统采用SCI进行控制接口的设计[ 4 ]。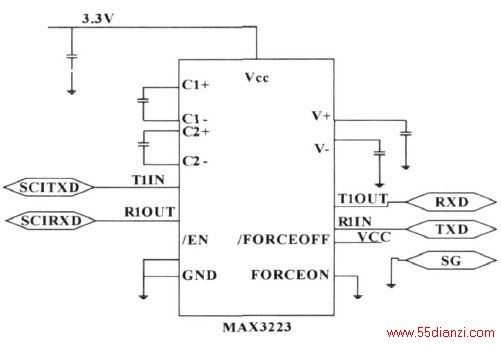
图2 通讯硬件接口图
如图2 所示, 利用MAX3223 进行电平转换,TMS320LF2407与PC 的通讯采用三线制, 通讯中,双方都被看作终端设备, 采用全双工模式。
3.2 主回路设计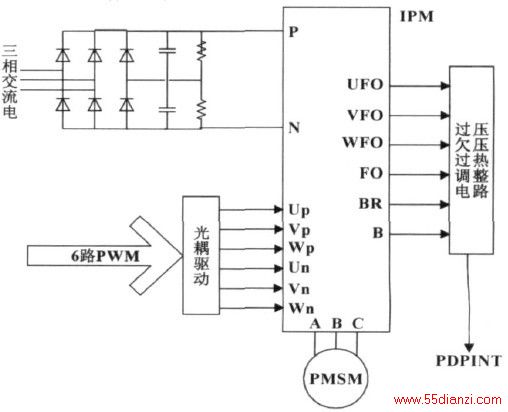
图3 主回路
上一篇:电动执行机构在锅炉上的应用及维护






