4 系统软件设计
TMS320LF2407型DSP支持C语言编程及混合编程, 具有JTAG接口。利用仿真器和TI公司CC2000仿真软件就能方便地对所编写的程序进行调试。为提高控制的实时性, 软件采用中断服务来实现AD 转换、QEP捕捉和PI调节。
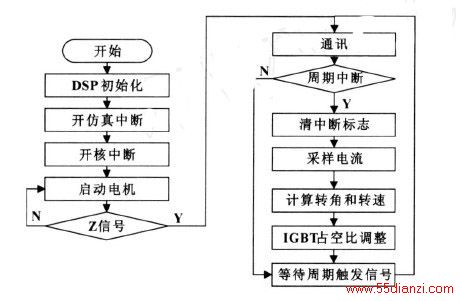
图4
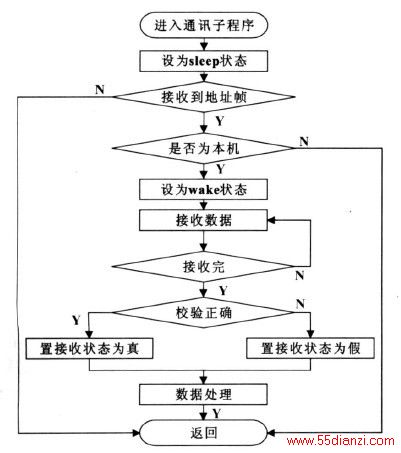 图5
图55 实物实验
实验用电机参数如表1所列, 图6给出了空载情况下目标速度为200 r /min 时的速度阶跃响应特性,由图6可以看出其响应时间为10ms, 稳态误差小于1% 最大超调量小于5% , 因此该系统具有良好的动态性能; 图7记录了系统稳定性试验的过程, 在115 s时刻系统突加50%负载, 可以看到该系统很快恢复到稳定状态; 图8 显示的是系统跟随性能试验的结果,在系统零速状态下, 输入对应于额定转速的阶跃指令,可以看出系统响应速度快, 跟随性能优越; 在位置跟试验中, 通过输入不同频率( 0 < F <500kHz) 的脉冲指令,通过观察该系统面板操作器上的位置偏移脉冲监视, 可以看到该系统的定位精度为±1 个脉冲。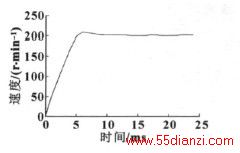 图6 速度响应曲线
图6 速度响应曲线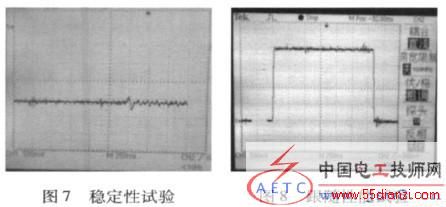
6 结论
以永磁同步电机、DSP、CPLD、IPM和光电编码器构成的交流伺服系统具有硬件结构简单、可靠性高、控制精度高、动态响应快等优点。电流环采样频率可以达到10kHz以上, 可以提供足够的频带宽, 从而实现高精度、快速响应的伺服系统。实验证明,该矢量控制系统各项指标均满足工程设计要求, 具有良好的动态性能。
参考文献
【1】王健. 现代交流伺服系统技术和市场发展综述[ J ].伺服控制, 2007 (1).
【2】郭庆鼎, 王成元. 交流伺服系统[M ]. 北京: 机械工业出版社, 1994.
【3】刘念洲, 刘晓林, 王坚强. 基于DSP的永磁同步电机控制系统设计[ J ]. 船电技术, 2004 (2).
【4】刘和平, 严利平, 张学锋, 卓清锋. TMS320LF240XDSP结构、原理、应用[M ]. 北京: 北京航空航天出版社, 200213.
上一篇:电动执行机构在锅炉上的应用及维护






