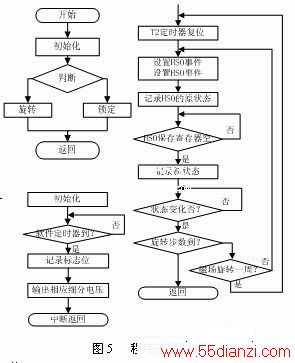
本系统程序采用C语言编写,下面就列出HSO脉冲输出的功能代码: IOC2=0X40; 允许锁定CAM功能 ICO0=0; 允许T2CLK作T2的时钟源 HSO_COMMAND=0xCE; 锁定T2复位命令 HSO_TIME=time_reset; 设置T2的复位周期 Delay(8); 至少需延时8个机器周期 HSO_COMMAND =0x71; 对HSO.0定时置位 HSO_TIME= time_up; 设置置位时间 Delay(8); HSO_COMMAND=0x71; 对HSO.0定时复位 HSO_TIME=timer_down; 设置复位时间, 4.结束语 选用80C196KC和两片或更多片PBL3717A芯片可以构成一个稳定的二相或多相步进电机控制系统,利用80C196KC高速输出口输出脉冲控制波形精确,CPU开销少,通过软件参考电压细分功能,可以很好的实现步进电动机的整步、半步和微步距控制。这种步进电机控制系统,成本低,控制方便,性能稳定,有较高的实用价值。 参考文献: [1] 王晓明. 电动机的单片机控制[M]. 北京航空航天大学出版社,2002 [2]SGS公司. PBL3717A Stepper Motor Driver [3]徐爱卿. Intel16位单片机(修订版)[M]. 北京航空航天大学出版社,2002 [4]杨忠宝,林海波,基于80C196MC的步进电机斩波恒流均匀细分电路的实现,微计算机信息,2003,19(7)
上一篇:LED日光灯灯板的特点






