MOVE_D_RV(D向后运行,27H):
以上与MOVEARN和MOVEA_RV类似,分别用于控制B、C、D电机运行。
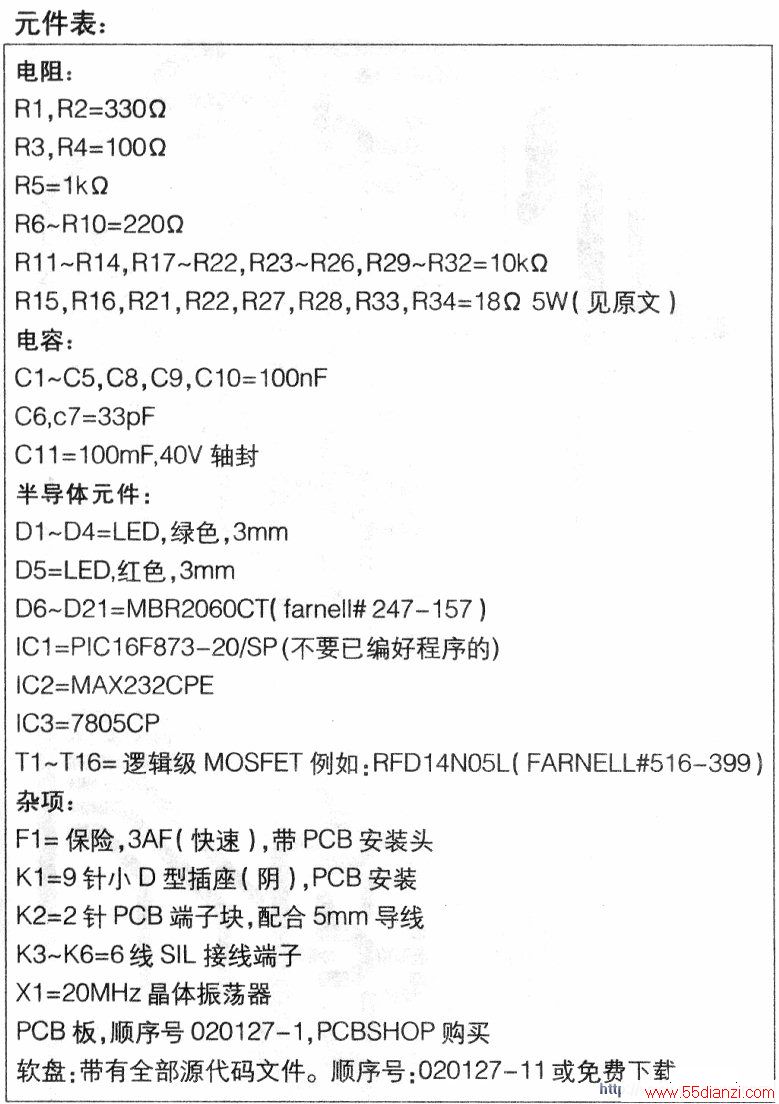
在使用PIC编程器进行编程时,不要忘记关闭DEBUG_MODE特性,确认POWER_ON_RESET有效,并且关闭WATCH_DOG_TIMER和BROWN_OUT_DETECT特性。还要确认时钟的速度已设置为20MHz。
推荐的PIC编程器和开发组件是:
ELEKTORELECTRONICS公司的PICProg2003,以及MICROCHIP公司的PICSTART及ICD模块(需要外加一个28针接头)。或者使用TAYLICLTD公司提供的能与ICD模块相当的产品代替(价格在50英镑以下),完全与从MICROCHIP公司免费下载的软件兼容。
PC机的软件PC机的软件用BORLANDDELPHI4语言编写,称作QCCOM32的免费视频元件库(VCL)软件用来做串行口的存取。
从网站下载的测试程序,用于说明命令是怎样通过串口传送给步进电机的。此程序也可以在站点www.ELEKTOR-ELECTRONICS.CO.UK上免费下载取得。确认QCCOM32的属性设置与固件中UART初始化时的属性完全匹配十分重要。基本数传率=38400bit/s。为使每个命令传到微控制器上,端口要打开,传送所需字节,然后程序等待一个应答信号,最后关闭端口。
测试与应用在加电之前,先检查所有元件是否正确的安装并焊接牢固。拔掉所有步进电机的连线,然后加电。用电流表测试电路的输出电流。然后用电压表看一下电源电压是否正常。在这一步如果出现任何错误,要立即关掉电源并检查PCB板和连接器。
当电路加电正常时,5个LED管都应该点亮,表示微控制器电路正常。
如果仅有一个LED管亮,表示电路已加电,但微控制器固件运行不正确。如果微控制器已经正确编程,那么检查一下在相应管脚接到的电源电压;如果正确,就检查一下振荡器元件(X1、C6、C7),确认这些元件装配正确;如果仍然无效,可试着重新编程,或重新拔插一下微控制器芯片。
一旦电路正确开始工作。使用一个1:1(非交叉)的九针连接器和电缆将控制器的PCB板与PC机的RS232口相连。运行PC机上的测试软件并选择适当的COM口设置。然后试着测试各命令。在传送一个命令的过程中,4个LED灯灭,一个点亮,以指示使用的是那一个通道。一旦命令执行后.4个LED灯点亮。如果工作过程正确,关闭控制器电源。将一台电机接到某通道上,注意确认相位和公共插头连接正确。然后接通电源,重新测试。启动和停止时,电机应平稳地旋转、加速和减速。
如果电机出现跳动,运动不平稳,可检查一下各相位连接是否正确。对于步进电机来说,加速不可太快。记住:小的延时周期意味着高的转速。如果你以同样的延时来设置速度,将不会有加速和减速阶段。大多数步进电机以500~1000步延时来工作。
当所有的测试完成并能正常工作时,你就可以定制你的命令(PC机)软件和控制(PlC)软件,使之包含你所要执行的命令和改进功能。通过较大的修改,还可以控制多台步进电机,使之在任何时候沿不同轴向旋转。本文讨论的这种驱动器可以在机器人上找到。也可用于光学仪器、机器人、照相机或CNC机械工具中部件的精确运动和定位控制。
上一篇:实用空调控制电路制作






