内容摘要:三电平整流器由于其独特的优点,受到了越来越多的重视。介绍了三电平桥式整流器的工作原理,并用数字信号处理器对其控制系统进行了实现,说明了全数字控制系统的硬件设计和软件设计的方法。仿真和实验结果验证了理论研究的结果。
关键词:数字信号处理器;三电平;PWM整流器;功率因数校正
引言
三电平(ThreeLevel,TL)整流器是一种可用于高压大功率的PWM整流器,具有功率因数接近1,且开关电压应力比两电平减小一半的优点。文献[1]及[2]提到一种三电平Boost电路,用于对整流桥进行功率因数校正,但由于二极管整流电路的不可逆性,无法实现功率流的双向流动。文献[3],[4]及[5]提到了几种三电平PWM整流器,尽管实现了三电平,但开关管上电压应力减少一半的优点没有实现。三电平整流器尽管比两电平整流器开关数量多,控制复杂,但其具有两电平整流器所不具备的特点:
1)电平数的增加使之具有更小的直流侧电压脉动和更佳的动态性能,在开关频率很低时,如300~500Hz就能满足对电流谐波的要求;
2)电平数的增加也使电源侧电流比两电平中的电流更接近正弦,且随着电平数的增加,正弦性越好,功率因数更高;
3)开关的增加也有利于降低开关管上的电压压应力,提高装置工作的稳定性,适用于对电压要求较高的场合。
1 TL整流器工作原理
TL整流器主电路如图1所示,由8个开关管V11~V42组成三电平桥式电路。假定u1=u2=ud/2,则每只开关管将承担直流侧电压的一半。
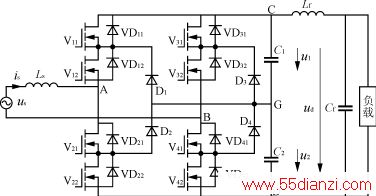
图1 TL整流器主电路
以左半桥臂为例,1态时,当电流is为正值时,电流从A点流经VD11及VD12到输出端;当is为负值时,电流从A点流经V11及V12到输出端,因此,无论is为何值,均有uAG=uCG=+ud/2,D1防止了电容C1被V11(VD11)短接。同理,在0态时,有uAG=0;在-1态时,有uAG=uDG=-ud/2,D2防止了电容C2被V22(VD22)短接。
右半桥臂原理类似,因此A及B端电压波形如图2所示,从而在交流侧电压uAB上产生五个电平:+ud,+ud/2,0,-ud/2,-ud。
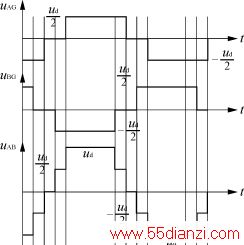
图2 TL整流器波形
每个半桥均有三种工作状态,整个TL桥共有32=9个状态。分别如下:
状态0(1,1) 开关管V11,V12,V31,V32开通,变换器交流侧电压uAB等于0,电容通过直流侧负载放电,线路电流is的大小随主电路电压us的变化而增加或减小。
状态1(1,0) 开关管V11,V12,V32,V41开通,交流侧输入电压uAB等于ud/2,输入端电感电压等于us-u1。电容C1电压被正向(或反向)电流充电(u1
状态2(1,-1) 开关管V11,V12,V41,V42开通,输入电压uAB=ud,正向(或反向)电流对电容C1及C2充电(或放电),由于输入电感电压反向,电流is逐渐减小。
状态3(0,1) 开关管V12,V21,V31,V32开通,交流侧输入电压uAB等于-ud/2,输入电感上电压等于us+u1。电容电压被正向(或反向)电流充电(或放电)。
状态4(0,0) 开关管V12,V21,V32,V41开通,输入端电压为0,电容通过直流侧负载放电,线路电流is的大小随主电路电压us的变化而增加或减小。
状态5(0,-1) 开关管V12,V21,V41,V42开通,交流侧电压为ud/2,正向(或反向)电流对电容C2充电(或放电),电容C1通过负载电流放电。
状态6(-1,1) 开关管V21,V22,V31,V32开通,uAB=-ud,正向(或反向)线电流对两个电容C1及C2充电(或放电),由于升压电感电压正向,线电流将逐渐增加。
状态7(-1,0) 开关管V21,V22,V32,V41开通,交流侧电压电平为-ud/2,正向(或反向)电流对电容C2充电(或放电),电容C1通过负载电流放电。
状态8(-1,-1) 开关管V21,V22,V41,V42开通,输入端电压为0,升压电感电压等于us,两个电容C1及C2均通过负载电流放电。电流is根据电压us的变化而增加(或减小)。
2 硬件电路设计
从图2可以看出,在输入电压频率恒定的情况下,要在变换器交流侧产生一个三电平电压波形,输入电压一个周期内应定义两个操作范围:区域1和区域2,如图3所示。
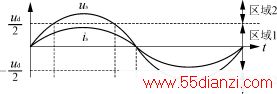
图3 工作区域
在区域1,电压大于-ud/2,并且小于ud/2,在电压uAB上产生三个电平:-ud/2,0,ud/2。同理,在区域2,电压绝对值大于ud/2,并小于直流侧电压ud,在电压正半周期(或负半周期)上产生两个电平:ud/2和ud(或-ud/2和-ud)。相应电平的工作区域如表1所列。
表1 相应电平的工作区域 工作区域 1 2 1 2
us>0 us<0 us>0 us<0
高电平 ud/2 0 ud -ud/2
低电平 0 -ud/2 ud/2 -ud
为方便控制,这里定义两个控制变量SA及SB,其中
SA=
(1)
SB=
(2)
根据表1可以设计一个开关查询表,如表2所列,将其存储在DSP中,当进行实时控制时,便可根据输入电压、电流信号,从表中查询所需采取的开关策略。
表2 查询表 SA SB V11 V12 V21 V22 V31 V32 V41 V42 uAB
1 1 1 1 0 0 1 1 0 0 0
1 0 1 1 0 0 0 1 1 0 ud/2
1 -1 1 1 0 0 0 0 1 1 ud
0 1 0 1 1 0 1 1 0 0 -ud/2
0 0 0 1 1 0 0 1 1 0 0
0 -1 0 1 1 0 0 0 1 1 ud/2
-1 1 0 0 1 1 1 1 0 0 -ud
-1 0 0 0 1 1 0 1 1 0 -ud/2
-1 -1 0 0 1 1 0 0 1 1 0
整个控制系统以一片DSP为核心,控制框图如图4所示。
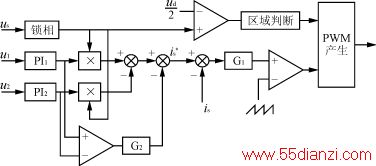
图4 控制框图
锁相环电路产生一个与电源电压同相位的单位正弦波形,ud的采样信号通过低速电压外环调节器进行调节,电流is的采样信号通过高速电流内环G1进行调节,电容C1端直流电压u1与电容C2端直流电压u2分别通过两个PI调节器进行调节,补偿环G2用于补偿两只电容电压的不平衡。
检测的线电流命令is与参考电流is*比较,产生的电流误差信号送至电流内环G1,以跟踪电源电流变化,产生的线电流波形将与主电压同相位。
3 软件设计
系统采用两个通用定时器GPT1及GPT2来产生周期性的CPU中断,其中GPT1用于PWM信号产生、ADC采样和高频电流环控制(20kHz),GPT2用于低频电压环的控制(10kHz),两者均采用连续升/降计数模式。低速电压环的采样时间为100μs,高速电流环采样时间为50μs。中断屏蔽寄存器IMR,EVIMRA和EVIMRB使GPT1在下降沿和特定周期产生中断,GPT2则仅在下降沿产生中断。
整个程序分为主程序模块、初始化模块、电流控制环计算模块、电压控制环计算模块、PWM信号产生模块等五大部份。程序流程如图5所示。
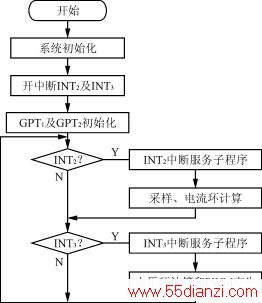
图5 主程序流程
上一篇:双向可控硅过零检测、触发电路






