目前,很多有关电机的控制中都使用单片机等智能可编程器件来执行马达控制算法。
本文介绍几种可将单片机的输人,输出口(I/O)与功率电子驱动电路相连接的方法与技巧,还介绍了正确地进行相关硬件及软件设计与应用的方法。
一、栅极驱动接口电路
半桥输出电路结构可用于多种电机控制,包括有刷直流电机、无刷直流电机、交流感应式电机及永磁交流电机。电源级电路需要一个栅极驱动接口电路。该电路至少应具备以下功能:1.将MCU输出的逻辑电平进行转换,在晶体管的栅极和源极间提供一个10V~15V的电平。2.在晶体管的导通和关断时提供足够大的驱动电流,以克服米勒电容的影响。
高端输出器件的选择是栅极驱动接口电路的一个问题。在电源输出级电路中。无论是高端或低端输出。都应该采用N沟道器件。在裸片尺寸和击穿电压固定的情况下,P沟道器件的导通电阻往往比N沟道器件高。使用P沟道器件可简化栅极驱动电路。但会增加设计成本。
通常。裸片尺寸越大。成本越高。而且P沟道器件往往比同类的N沟道器件成本高。
由于低端器件的电位是相对于电路的接地点而言的。因此在电源级电路中产生一个用于低端器件的栅极电源电压十分容易。栅极控制电压必须以源极电住为参考。在高端晶体管中它是满幅电压。因此。电源级电路中的高端器件需要一个栅极电源,该电源基于源极电压上下浮动。
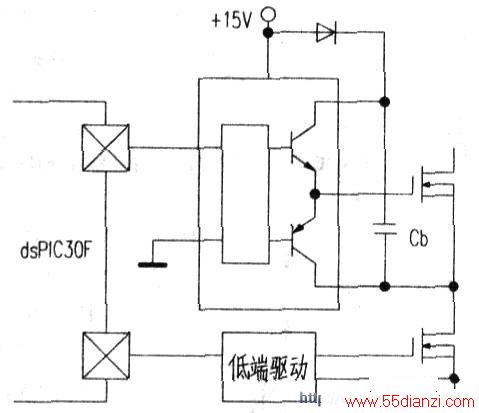
上图是常见的典型栅极驱动接口电路。电路中的自举电路给Cb电容器充电。电容器上的电压基于高端输出晶体管源极电压上下浮动。
二、栅极驱动器芯片
现在。有许多便宜的IC可简化栅极驱动电路的设计。其中有些只是简单的大电流驱动电路。不具备商端器件所需的电平转换电路。有些则包含电平转换电路,可直接与逻辑及功率器件对接。选择栅极驱动芯片时,要视设计的绝缘要求而定。光电耦合器既可以满足电平转换要求。又可使在设计中能选用简单的栅极驱动器芯片。
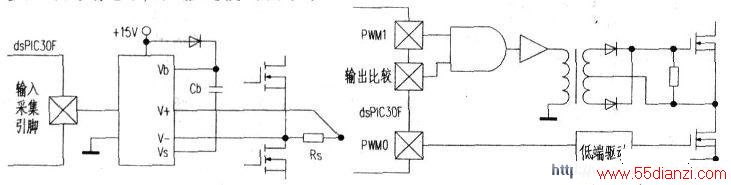
在许多电机控制设备中,线路总电源从与AC线路直接相连的全波整流电路获得并经过滤波。整流器的低端电压成为整个电路的参考电压(0V)。不过。这一参考电压并非接地电压。在低端也存在交流电压,它在0V左右和峰值线电压问来回波动。在许多低成本应用中,将单片机基于这一低端电位上下浮动是有意义的。不过,如果设计要求测试或现场服务的话。出于安全考虑最好加上信号隔离。至少在产品开发阶段使用的电机驱动硬件。应该具有信号隔离功能。中图所示为变压器隔离电路。
即使从尽量减少破坏风险来考虑,也应该采用隔离电路。在某一具体设计中,即使没有隔离反馈信号,也应该隔离栅极控制信号。否则。电源器件可能会被损坏或短路,从而使得直流总线电压通过驱动电路耦合回来。并流人逻辑器件中。
栅极驱动器芯片。通常还具有其他特性,包括欠压断电保护、插人一段死区、防止高端功率器件和低端功率器件交叉导通,以及过电流自动关机等。不过这些功能也会增加额外成本。
三、栅极驱动中的自举电路
有多种方法可产生栅极驱动电路的电源。原则上来说。高端驱动电路应该产生一个比DC总线电压高10V-15V的电压。用于输出级电路。由于自举电路无需浮动龟源。因此是最便宜的。如上图所示。自举电路给一只电容器充电。电容器上的电压基于高端输出晶体管源极电压上下浮动。下端的晶体管导通时。将高端晶体管的源极电压拉到约OV,只有此时电路才对电容器充电。电容器必须储备足够的电荷。以便在上端晶体管处于导通状态时维持所需的栅极电压。由于电容器的作用。自举电源无法保证上端的晶体管一直导通。当自举电容器上的电压下降时,高端器件便会关断。
由自举电路的局限性所产生的副作用与电机类型有关。对于用正弦波电流驱动的电机而言。自举电路会限制加在反相器上的PWM 占空比。可以通过改变自举电路中元件参数的大小的方法来增大占空比。不过。由于BLDC和SR电动机需要换相。因此通常不采用自举电路。
如果高端器件的栅极驱动必须保持连续,就必须使用浮动电路来产生比直流总线电压高10V-15V的电压。可以采用充电泵电路。它的电压是相对高端晶体管的源极电雎而言的。另一种方法。则是用一个高频信号来调制栅极信号。这样。在栅极驱动信号出现时。高频信号也会出现。在中图中,调制信号通过一只变压器耦合到晶体管的栅极和源极。并在变压器的次级经过整流产生栅极驱动电压。但是。上述两种方法都会增加设计成本,
四。电机反馈信号
电机和电源控制电路需要提供各种信号。这些信号视电机的类型及控制算法而定。采集一种反馈信号的方法很多。例如,许多电机控制算法需要知道负载中的相电流。测量相电流的最简单方法是使用霍尔效应电流传感器。霍尔传感器与驱动电机的高压电路完全隔离,它使用逻辑电路的电源,连接到单片机或相关电路的A/D转换器时所需元件极少。其缺点是成本高。
测量相电流的另一种方法,是采用PWM电流传感器芯片。它测量一只与负载串联、对电流敏感的电阻器上的电压降。经过设计,这些器件基于功率输出级输出的满幅电压上下浮动。并采用自举电源供电。
这种传感器的输出是PWM信号,其占空比与感应电阻器中的电流成正比。井有两种方法与微控制器连接。
第一种方法是采用一个RC滤波器网络对PWM的输出信号进行滤波。并把它转换成模拟信号。此方法的缺点是。控制算法要求滤波器输出中没有纹波和桐位误差。此外。
使用滤波器也增加了设计成本。
还有一种方法。是直接把PWM的输出信号送到微控制器上的输入采集外设引脚(见中图)。这一外设在输入信号处于上升沿和下降沿(或两者1时采集数字时基信号的脉冲数,并用软件进行处理,从而计算出输入信号的周期、频率或者占空比。当控制器有“输入采集”
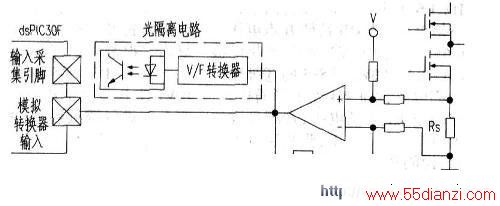
引脚时。也可以在设计中加上隔离式模拟放大器,通过模数转换得到相电流。用V/F或电压,PWM转换器把模拟信号转换成数字信号。模拟信号可用数字式光耦通过隔离电路传到控制器。与模拟隔离方案相比,V/F转换器与光耦方案成本较低,电路见下图。在图4中,用差动放大器来放大电阻器两端的电压。
然后送到A/D转换器的输入端。
测量相电流的第三种方法是。在电源级电路的每个低端晶体管源极串联一只感应电阻器,用羞动放大器放大电阻器两端的电压。然后送到A/D转换器的输入端。采用此方法,A/D转换器必须与控制晶体管的PWM信号同步。为了得到精确的电流信号,应当在电源输出级中的低端晶体管开通时进行测量。在使用分流电阻进行测量时,内建有A/D同步逻辑电路的控制器很有用。
五、软件开发
用传统的仿真器来开发电机控制软件比较困难。使用仿真器时,设计者可以在任何时刻停止应用软件的执行,以查看寄存器值以及代码执行的情况。但是。在某些时刻停止软件执行。
会对电机和电源电路造成极大影响。
在停止软件执行时,PWM控制值不再更新。电机和电源输出级电路中便会出现较大的直流电流。为了解决这_。问题,应该通过仿真器将PWM信号置于不会损坏负载的状态。例如。DSPIC30F系列 PWM外设部件,可在仿真器停止时将所有PWM输出引脚设置为低电平状态。这时,所有输出器件都关断。电机慢慢停下来。在产品开发过程中。加入额外的硬件保护功能十分有用。这些功能可在产品开发过程中出现软件错误时,保护硬件不受损坏,并可在正常生产时去除以节省成本。这些功能包括:限流、总线电压过载保护,以及在高、低端晶体管同时导通时关机。
总之,对于单片机应用电路中对电机的驱动,在选定某种控制器后。便要选择相应的元件来连接控制器和电源输出级电路。通常,单片机能够满足算法需求,但是它可能不具备与电机控制直接相连的外设部件。所以。必须在接口电路中增加相应硬件。以保护输出器件或处理反馈信号。