
 对于理想的电机系统,电机在稳态运行时,电磁转矩应为一定值。实际的电机系统,由于多种因素的影响,电机的电磁转矩是波动变化的。多变电磁转矩的存在,使得电机的实际角速度是波动变化的,即在电机角速度的平均值上叠加了一个波动俞量,即:
对于理想的电机系统,电机在稳态运行时,电磁转矩应为一定值。实际的电机系统,由于多种因素的影响,电机的电磁转矩是波动变化的。多变电磁转矩的存在,使得电机的实际角速度是波动变化的,即在电机角速度的平均值上叠加了一个波动俞量,即:
 当电机以某控制脉冲频率(f cp)运行时,其角速度有一最大值和最小值,如图1所示。角速度波动的峰峰值为:
当电机以某控制脉冲频率(f cp)运行时,其角速度有一最大值和最小值,如图1所示。角速度波动的峰峰值为:
 上式反映电机角速度的波动。表明电机运行平稳,大,表明电机运行不平稳,有振荡。角速度波动的峰峰值与控制脉冲频率的关系,可以表示
上式反映电机角速度的波动。表明电机运行平稳,大,表明电机运行不平稳,有振荡。角速度波动的峰峰值与控制脉冲频率的关系,可以表示
 4混合式步进电动机振荡特性的特点
4混合式步进电动机振荡特性的特点
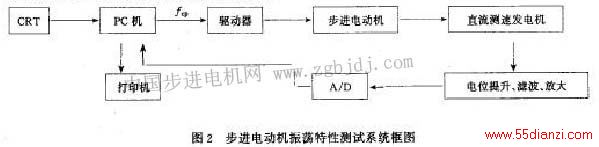 实测五相混合式步进电动机的振荡特性,以此分析混合式步进电动机的振荡特点。测试样机为一台90BYG5200B型五相混合式步进电动机。电机的基本技术数据为:转子齿数Zr=200,步距角θ=0.09度10. 18度,转子惯量t=4.1×10-4Nm.保持转矩Tk≥5Nm,相电流j=3A,空载起动频率fcp≥6 000脉冲/s,驱动电源为HH-1S3型升频、升压五相混合式步进电动机驱动器。电机功放电路为半桥星接驱动,通电方式为4-5相通电,采用所研制的微机测试系统对电机的振荡特性进行测量,图3为样机空载时的实测振荡特性曲线。
实测五相混合式步进电动机的振荡特性,以此分析混合式步进电动机的振荡特点。测试样机为一台90BYG5200B型五相混合式步进电动机。电机的基本技术数据为:转子齿数Zr=200,步距角θ=0.09度10. 18度,转子惯量t=4.1×10-4Nm.保持转矩Tk≥5Nm,相电流j=3A,空载起动频率fcp≥6 000脉冲/s,驱动电源为HH-1S3型升频、升压五相混合式步进电动机驱动器。电机功放电路为半桥星接驱动,通电方式为4-5相通电,采用所研制的微机测试系统对电机的振荡特性进行测量,图3为样机空载时的实测振荡特性曲线。
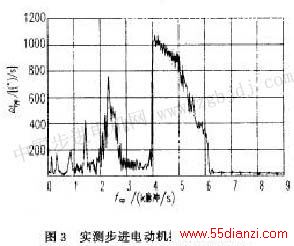 从实测的振荡特性曲线可以看到,电机有多个振荡区段。电机的振荡在某些区段表现为谐振现象,如在fw<3k脉冲/s的振荡区段;而在fe=4~6. 2k脉冲/s医段的振荡,振荡的前沿较陡,振荡强烈,振荡区间较宽,具有自激振荡的特点。这个强烈的振荡区段发生在电机运行的中频段,所以称为步进电动机的中频振荡或中频不稳定性。从图3的实测结果可知,混合式步进电动机的低频振荡并不严重,电机最严重的振荡发生在电机运行的中频段。
从图3可见,电机有多个共振点,若取L=4 500脉冲/s作为中频振荡区间的共振点,则共振点的控制脉冲频率及相互之间的关系见表1,从表1中可以看到各共振点与cpi之间有整数倍的关系。
从实测的振荡特性曲线可以看到,电机有多个振荡区段。电机的振荡在某些区段表现为谐振现象,如在fw<3k脉冲/s的振荡区段;而在fe=4~6. 2k脉冲/s医段的振荡,振荡的前沿较陡,振荡强烈,振荡区间较宽,具有自激振荡的特点。这个强烈的振荡区段发生在电机运行的中频段,所以称为步进电动机的中频振荡或中频不稳定性。从图3的实测结果可知,混合式步进电动机的低频振荡并不严重,电机最严重的振荡发生在电机运行的中频段。
从图3可见,电机有多个共振点,若取L=4 500脉冲/s作为中频振荡区间的共振点,则共振点的控制脉冲频率及相互之间的关系见表1,从表1中可以看到各共振点与cpi之间有整数倍的关系。
 图4为对应于图3几个振荡点的实测角速度及相应的角位移特性曲线。从振荡点的角速度变化曲线可看到,角速度在振荡点的波动很大,角速度波动的波形基本上是正弦波,振荡频率基本相同,且为一低频分量。
图4为对应于图3几个振荡点的实测角速度及相应的角位移特性曲线。从振荡点的角速度变化曲线可看到,角速度在振荡点的波动很大,角速度波动的波形基本上是正弦波,振荡频率基本相同,且为一低频分量。
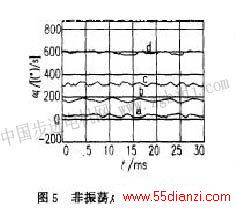
 从图中可以看到,电机在非振荡区,角速度也是波动变化的,角速度波动的主要成分是低频分量,波动的幅值比较小。
从图中可以看到,电机在非振荡区,角速度也是波动变化的,角速度波动的主要成分是低频分量,波动的幅值比较小。
 5结论
从实测的电机振荡特性曲线可以看到电机的振荡特性有如下特点:
(1)混合式步进电动机的低频振荡并不严重,电机最严重的振荡发生在电机运行的中频段。
(2)电机的振荡可分为两类,一类是电机的受迫振荡,受迫振荡一般发生在中低频段;另一类是自激振荡,自激振荡产生在电机运行的申频段,其特点是振荡的前沿较陡,振荡的幅值大、频带宽。
(3)电机的实际角速度是波动变化的,在非振荡区,角速度的波动比较小;在振荡区,角速度的波动很大,其波动的波形基本上是正弦波。共振点的振荡频率基本相同,共振点之间有一定的比例关系。
5结论
从实测的电机振荡特性曲线可以看到电机的振荡特性有如下特点:
(1)混合式步进电动机的低频振荡并不严重,电机最严重的振荡发生在电机运行的中频段。
(2)电机的振荡可分为两类,一类是电机的受迫振荡,受迫振荡一般发生在中低频段;另一类是自激振荡,自激振荡产生在电机运行的申频段,其特点是振荡的前沿较陡,振荡的幅值大、频带宽。
(3)电机的实际角速度是波动变化的,在非振荡区,角速度的波动比较小;在振荡区,角速度的波动很大,其波动的波形基本上是正弦波。共振点的振荡频率基本相同,共振点之间有一定的比例关系。本文关键字:电动机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路






