消防坦克的功能是自动寻找火源和灭火,它的基本工作流程是:发现火源一定向并驶向火源一向火源喷水灭火。
1、发现火源:要能够实现自动寻找火源,我们借助的是1个STC89C52单片机和7红外传感器,程序控制整个过程。通过单片机实时扫描红外传感器传给单片机I/O口的电平信号来实现自动检测,从而达到寻找火源的目的。
2、定向并驶向火源:当红外传感器检测到火源发出的红外信号的时候,单片机对7个红外传感器信号处理分析,从而确定火源的位置,并控制坦克小车运动方向锁定火源。
3、向火源喷水灭火:当坦克小车到达火源后,单片机通过传感器的信号分析判断是否到达火源。
如果确实到达,则停车执行喷水动作,直到将火扑灭。
单片机程序由C语言编写与调试。
基于以上原理分析我们需要搭建必须的硬件平台。主要包括:控制模块一单片机系统电路(5V);运动模块及喷水模块——电机驱动电路(12V);检测模块——红外传感器驱动电路(5V);各模块电路如图:
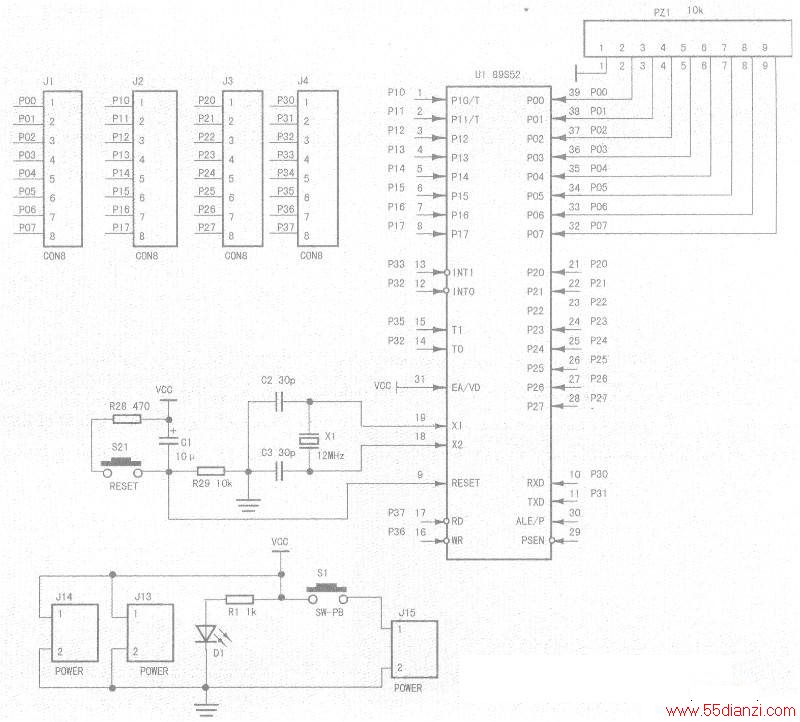
1、单片机控制系统电路原理图如下图:(51单片机最小化系统)。
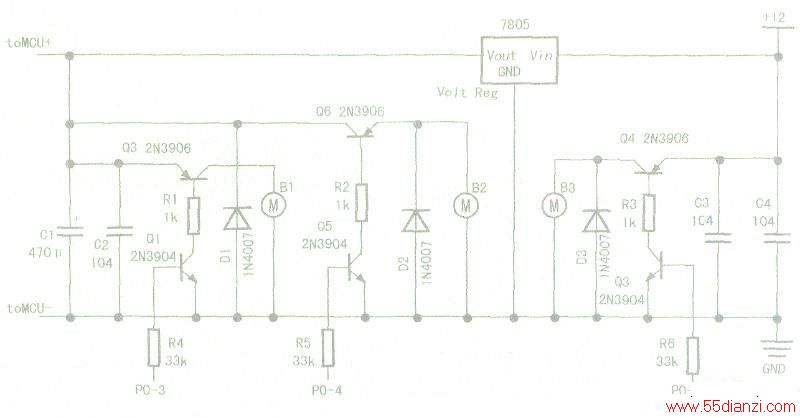
2、直流电机电机及水泵驱动电路原理图如下图。
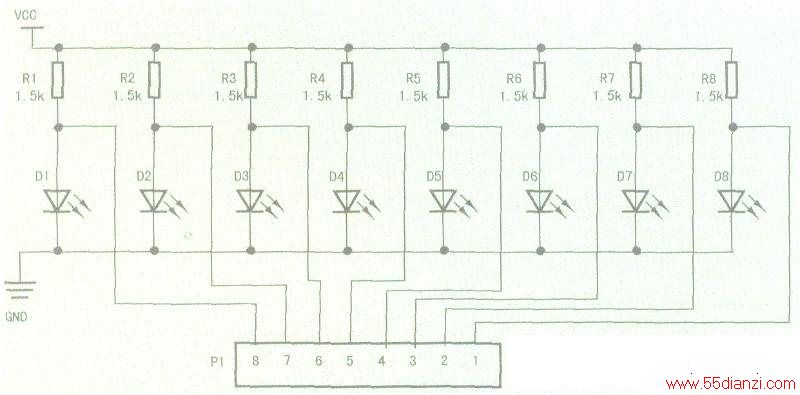
3、红外传感器驱动电路,原理图如下图。