设计一款具备道路记忆功能,可选择最优路径的两轮式机器人。
一、系统硬件设计
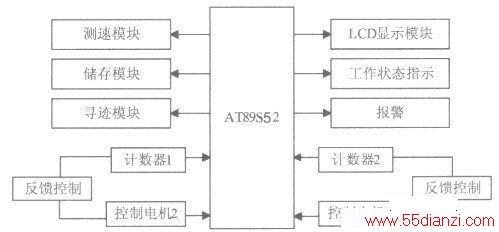
核心控制部分采用ATMEL公司的8位MCUAT89S52。作为一款现在广泛应用的MCU,该MCU价格低廉且有很高的性价比。外接存储模块采用24LC512芯片。系统硬件设计框图如下图所示。
二、系统设计要点
两轮式移动机器人的速度及方向可由左右轮分别作为驱动轮来控制,MCU通过驱动芯片L293D来驱动两个电机。AT89S52可通过两轮对应的两个计速器来分别控制这两轮的转速,从而实现机器人的前进和转向。
1.光电检测
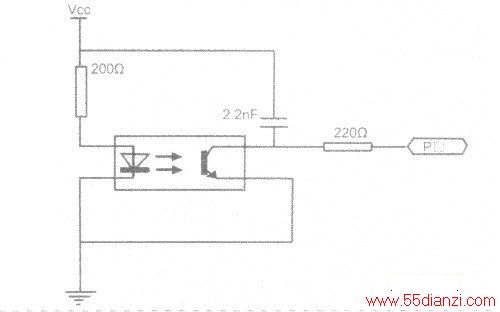
计速部分如下图所示,本设计采用光电传感器来检测粘贴有均匀分布黑带和白带的车轮。当光电传感器中间有黑色物体挡住时,输出电平为0;无遮挡物时,输出为电平1。根据检测出的脉冲及圆盘上黑带的个数可计算出圆盘的转速,由此还可以计算出行驶的距离。
寻迹部分采用四个光电传感器来检测黑线。
如下图所示,在小车具体的寻迹行驶过程中,为了能精确测定黑线位置并确定小车行走的方向,需要同时在底盘安装四个光电传感器,它们全部在一条直线上。小车始终沿着黑线运行,当小车偏离黑线时,第一级探测器会探测到有黑线,MCU就会按照预先编写的程序发送指令给小车的控制系统,控制系统再对小车路径予以纠正。若小车回到了轨道上,即四个探测器都只检测到白纸,则小车会继续运行;若小车由于惯性过大依旧偏离轨道,越出了第一级两个探测器的探测范围,这时第二级探测器,再次对小车的运动纠正,使之回到正确的轨道上,第二级方向探测器实际是第一级的后备保护,从而提高了小车寻迹的可靠性。
2.道路学习记忆
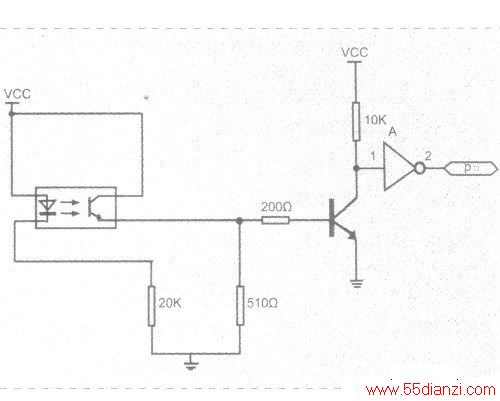
计数芯片选用二进制串行计数器CD4060,光电开关的输出波形经施密特触发器整形为标准脉冲信号,使CD4060计数更为方便。这里我们设定每隔T时间记录到脉冲数M,T时间内圆盘转速N=M/(LT)(设L为圆盘上的黑带数)。由于T越小,结果越精确,故T可以取几至几十毫秒。
数据记录后经MCU送至外接芯片24LC512中。
通过上述过程可对机器人进行道路训练,即每隔T时间将两轮速率分别记入存储芯片。训练结束后,存储芯片中存储的是两轮每隔T时间一次的速率,这样就可实现对训练道路的记忆。
3.道路循迹重复
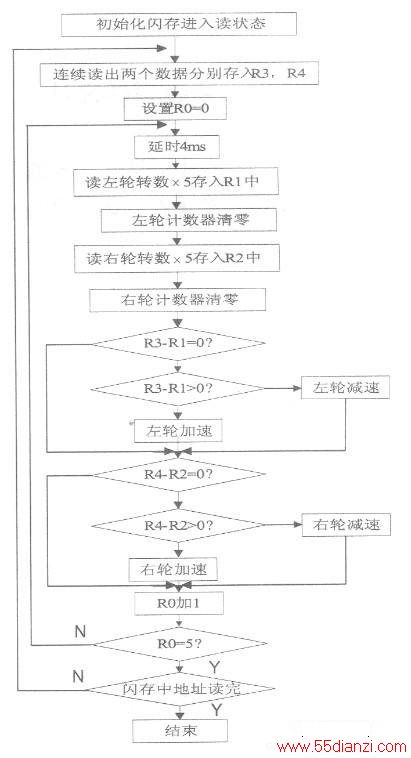
在对该机器人进行输出控制时,先由微控制器MCU从存储芯片中读取数据,再将每隔T时间的转速数据通过脉冲输出(根据硬件可调节输出的倍数),并通过L293D芯片驱动两轮电机的转动。为确保输出的转速和原记录的一致,可用反馈控制的方法在驱动电机转动的同时,由计速器模块同时检测两轮的转速,然后分别比较两轮的转速(这是除以输出的倍数后的转速)是否和原记录转速相同:若小于原记录转速,可调用加速子程式;若大于原记录转速,则调用减速子程式。
由于计数时间T较小,再加上反馈控制的作用,这样就可确保输出的运动轨迹精确接近于原训练道路,误差很小。
三、系统软件设计
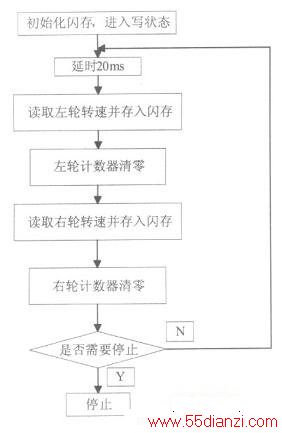
上下图分别为机器人道路学习记忆、循迹重复的软件流程。道路学习记忆时的记录时间间隔T取20ms,输出控制时,在每一个记录周期内比较5次,以使输出更精确于原记录数据。
该机器人相比无线遥控操作机器人的优势在于,可工作在电磁波屏蔽的场合。一次训练后,第二次运行时可以在保证精度的前提下提高速度。
本文关键字:机器人 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:ER300码垛机器人机构分析






