前 言
目前国内外电动车技术高速发展,欧美许多国家已经将向年长者及残障人士提供电动车作为社会保障体系的一部分,其中控制器是电动车的核心零部件,决定了电动车的稳定性与可靠性.如何保障电控零件的质量稳定性和一致性,是本文研究的重点.
对于控制器的传统测试,大多只测试电路板的电气特性,普遍存在着测试点测试工序繁琐,部分特性很难检测;数据量大,处理困难;人工检测效率低,人为因素加大;产品追溯困难等问题.针对上述不足,本文设计并实现了能对电动车控制器各功能在线自动检测的智能测试系统.该系统能通过控制分析软件的调度,结合模拟负载装置,自动进行功能测试,可以基本消除人为不确定因素.人机界面友好,显示的测试参数丰富,可自动出具测试报告,并将测试结果存在数据库中,留作历史数据记录以待查询.
1 电动车控制器测试系统的组成及工作原理本文所针对的电动车控制器包括串口通信模块,前后灯及喇叭的控制与故障检测,速度控制与检测模块,电源控制模块,电机功率驱动等.由于电子元器件本身存在质量缺陷及生产中出现各种工艺问题,将会导致控制器硬件在某方面工作不正常,因此测试系统必须能够检测出硬件的所有问题,并快速定位.控制器输入信号有开关量.模拟量.脉冲量等,输出信号为驱动电机的模拟量,并有双向通信的串口信号.
该智能测试设备由系统电源模块,主控制器PIC18F65J10,通信模块,车灯与喇叭的负载模拟与检测模块,电机信号模拟与反馈检测模块,行驶信号与速度传感器模拟模块组成.测试系统的结构图如图1所示.
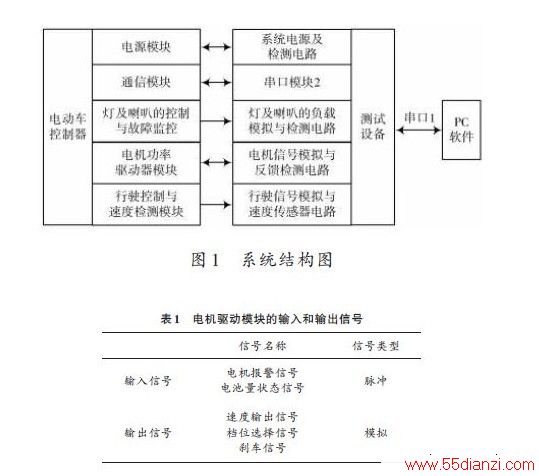
测试系统工作原理:测试人员在PC 机界面选择要测试的条目,PC 机通过串口1将此命令发送给测试设备;测试设备解析控制分析软件的条目命令,模拟出该模块的信号并输入至控制器,同时,测试设备通过串口2和控制器进行通信,命令控制器启动该模块的功能.由测试设备采集数据将结果实时发送至PC 机;PC 的控制分析软件通过对比信号的检测值与预设值是否一致来判定控制器是否工作正常,并将该产品的测试数据保存到数据库中,以待查询.
2 系统硬件设计2.1 系统电源的设计不同芯片对供电电压的要求也不同,本测试系统中,单片机所需的电压为3. 3 V,而行驶控制与速度传感器模拟电路,所需要的电压为5 V,因此,电源模块的设计要满足需求,设计时就需要兼顾两者,外部只需提供24 V 电瓶电压即可.电源电路设计如图2所示.
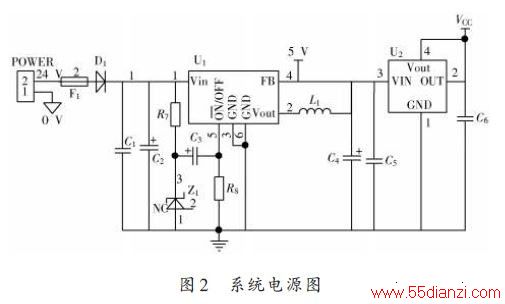
本系统选用LM2576和LM1117两个稳压器.分别提供5 V,3.3 V稳定的电压,为了防止短路加了保险丝F1.
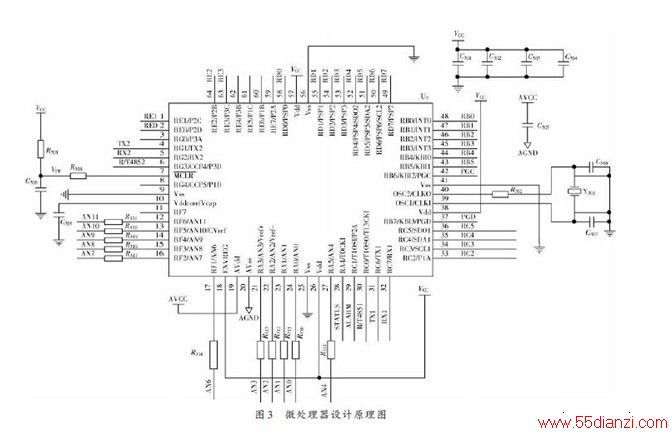
2.2 主处理器的设计微处理器选用MicroChip 公司最新加密型CPU-PIC18F65J10单片机.该单片机将大量的外围模块整合到单片机内,包括看门狗.两个串行通信口(UART 0,1).一个SPI 口.一个10 位A/D 转换器.基本定时器(BasicTimer)等,处理速度快,足够满足系统要求,且该单片机具有简单实用.成本低.抗干扰能力强.功耗低等特点.
PIC18F65J10单片机电路设计原理图如图3所示.
2.3 模拟灯及喇叭驱动电路的负载设计控制器对各种灯(大灯.转向灯.刹车灯)的驱动是在灯的两端加载24 V 电压,通过的电流是恒定的.因此模拟驱动电路的负载,就是在驱动电路的两端加上一个电阻模拟灯,使其通过的电流和灯相等.以左大灯为例,其他灯和喇叭控制电路原理相似,不再赘述.负载电路检测图如图4所示.
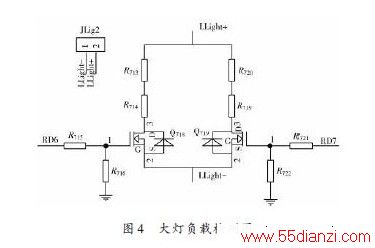
制的一路开关选通时模拟灯的正常负载.当RD7控制的一路开关选通时模拟灯的短路负载.当两路开关都截止时,模拟灯的断路状态.电动车控制器会按照测试设备的命令对灯的各种状态进行检测.并将检测结果传给测试设备.
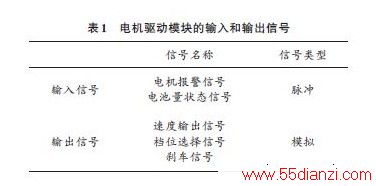
2.4 电机驱动模块的模拟设计电机驱动模块是电动车控制器的核心,包括速度控制输出信号,报警输入信号,紧急刹车输出信号,档位控制输出信号,电量状态输入信号等,见表1.
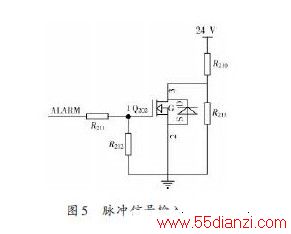
输入信号电路设计如图5所示,通过控制引脚控制开关Q202 的通断,因为电瓶电源是24 V,而输入信号的高电平是12 V,因此需要分压.
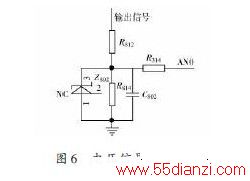
输出信号是电机驱动模块根据测试设备的指令输出不同的电压信号,测试设备需要对输出的电压信号进行检测.检测电路如图6所示,稳压二极管防止波峰电压过高,电容用来滤波.
2.5 模拟脚踏速度控制设计控制器对用户脚踏信号的采集是通过给可调电阻提供5 V 电压,在不同位置将输出不同电压,通过电压值控制速度的大小.因此用三路模拟电压通路给控制器的接受电路发送不同状态的电压值,以此来检测控制器接受电路是否能够正确采集,电路原理如图7所示.

系统选用集成芯片TS5A3359,其工作性质见表2,测试设备通过引脚RD4,RD5控制选通开关IN1,IN2,分时选通NO0,NO1,NO2 三路开关.并将不同的模拟电压输出给电动车控制器.电动车控制器采集到相应的电压值后,通过通信接口发送给测试设备.
#2..
2.6 模拟速度传感器电路设计控制器对速度传感器信号的采集是一个通断信号,因此用一个开关数字量来进行模拟.为提供速度传感器的模拟脉冲,电路设计原理与图5同.
3 控制分析软件的设计3.1 通信协议PC 机通过串口与智能测试终端相连,本文设计的串口通信采用半双工通信,速率为115 200 Kb/s,以完成命令与数据通信的需要.基于帧的协议设计思想,即在向串行口发送命令信号.回传数据信号时,信号是一帧一帧发送的.通信链路中所有的内容都将包含在这样的一个帧中,无论它是控制命令还是传送的数据.
为了使数据可靠的传输,将每一帧信号惟一对应一个命令帧.为了避免数据发生错乱,通信方式采用主从应答方式,即PC 作为主机,测试设备作为从机,由PC 以固定周期100 ms发起命令帧.当测试设备收到命令帧以后,就会回传一个数据帧给PC机.帧格式如下:

帧格式由九个字节组成,分别是同步字SYNC,命令类型CMD,数据D0~D4 和校验信号BCC.同步字SYNC:标志一帧数据的开始;命令字节CMD:用于标识需要执行的指令类型,即是哪一项功能检测;数据字节D0~D4:对于PC机来说是提供执行该命令所扩展的辅助数据,没有用到.而对于测试设备,则是存储的测试数据;校验字节BCC:用于测试终端确认该帧是否有效以免通信错误.
其中命令帧和数据帧第一个字节是用来标志一帧数据的开始,而头字节之所以用“0×55”,是因为传输过程中,产生的干扰信号,多为连续高电平或者连续低电平,而“0×55”的二进制编码为:10101010,很少情况下会产生这样高低脉冲的干扰,因此使用“0×55”头字节有利于提高传输的可靠性.命令帧和数据帧第二个字节是命令字节,即代表要测试的项目.数据帧中的数据字节是单片机在工作过程中采集到的测试结果数据.命令帧和数据帧的最后一个字节都为校验字节,该字节是用来验证所有数据在传输过程中是否被破坏了.这里所使用的校验方式用是BCC 异或校验法(BLOCk CheckCharacter),即将前面两个字节异或,异或出来的字节再与下一个字节异或,直到一帧数据全部都异或过,得出的字节就作为校验字节.






