设计并制作一个具有连续打靶功能的智能机器人(机器人预先放置四只乒乓球)。机器人从A点出发,沿引导线行进,到达B点后将预置的乒乓球射向I号目标靶;然后继续沿引导线行进,到达C点后将预置的第二只乒乓球射向lI号目标靶;射击后继续沿引导线行进,到达D点后返回寻找引导线,当再次到达C点和B点时将另外两只乒乓球分别射向II号和I号目标靶,沿引导线回到A点并停车。
1.场地和设备
场地跑道要求水平光滑,表面颜色为白色,宽度为400rmm;起跑线为黄色,宽度为30rmm;跑道两侧边线为红色,宽度为15mm;中间引导线为黑色,宽度为50mm。在B点和C点引导线下面各埋有一长50mm,宽50rmm,厚度08~10mm的薄铁片。I、ll号目标靶均为800mm×800r11m的正方形木板(厚度任意),木板中心为一半径为150mm的圆形镂空。木板垂直于地面放置,l号目标靶放在从B点到圆心方向的连线1250mm处,ll号目标靶放在从C点到圆心方的连线1250mm处。
2.要求
机器人在地面的投影应该容纳在直径为500mm的圆形面积中,高度≤500mm。机器人上的射击装置应具有连续发射功能,即四只乒乓球在出发前应已放置好,竞赛演示过程中不得再安放乒乓球。竞赛用球是三星“红双喜”标准乒乓球(评判组提供);演示机器人不限型号;机器人不得有外接电源;机器人起跑前机身任何一部分不得超越起点线;机器人必须采用非接触启动方式;机器人启动后不得有人为干预机器人的行为。
分析以上所述,要求制作的打靶机器人具备的功能采用非接触启动方式,沿引导线(黑色)走直线和走“S”形,探测金属片,朝靶心方向连续自动发射乒乓球以及返回原点停车等。项目设计总体目标是:小车行走要快,打靶要准,动作到位。整个项目的重点是传球装置和发射装置的方案设计;难点是对所设计方案的可行性论证、试验与优化,从中探索出合理的方案。
设计方案如下:
1.声控启动
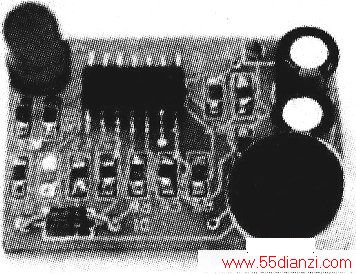
基于通用依耐特公司提供的PIC16F873A单片机主板及电机驱动模块等对整个项目进行方案的酝酿、论证和确定。为了实现非接触启动方式,选择了如下图所示的声控起动模块,该模块由话筒、放大电路、整形电路组成。话筒接收到声音信号,经放大、整形后。得到的是高低电平的变化——无声时输出高电平。有声时输出低电平。
2.寻黑线行走
沿引导线(黑色)行进,我们选择了如下图3所示的绝对光电模块。该绝对光电模块由辅助光源(发光二极管)、光敏电阻和比较器组成。它是基于光敏电阻原理设计的,当光敏电阻接收的光强接近时,其阻值较小,与固定电阻Rx分压后。使比较器的同相输入端电压低于反向输入端,比较器输出低电平。
通过调整电位器滑动臂的位置,即可使比较器输出低电平时的绝对光强。滑动臂向下调,反向输入端电压降低,需要更强的光照使光敏电阻的阻值更小,才能使同相输入端电压低于反向输入端,输出低电平。反之亦然。由于轨迹宽度为50mm,选用的左右光电模块彼此间距离稍大些为好,这样有利于提高车体行驶时的稳定性;同时,根据外部光照强度不同,在测试时应该适当调整电位器的阻值大小。
3.探测金属
探测金属片,我们选择了Autorlics PRl2-4DN接近开关,该传感器具有电压波动保护与过电流保护功能。还有体积小重量轻及探测灵敏等特点,工作电压DC5~30V,安装在车体的中部,探头距离地面2~3mm。
4.传球装置
朝靶心方向连续自动发射乒乓球是打靶机器人所要具备的重要功能,为了实现这一功能,计制作了传球装置和发射装置。
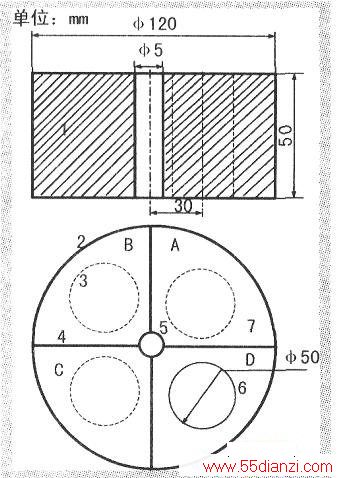
传球装置的作用是将乒乓球预置位,确保每次有且仅有一只球被发射。它由传球电机、扇片和盛装乒乓球的容器等组成。其中传球电机为永磁减速电机(DC5V,60rpm,3w)。如上图所示,1是扁平圆柱状盛装球的容器;2是容器的外围(材料为薄塑料片);3是区域A中乒乓球预置时原始位置;4是隔离及传送乒乓球的四块扇片(材料同样为薄塑料片),扇片固定在轴套上,可随电机同方向旋转,它将盛装乒乓球的容器1划分为ABCD四个大小相当的区域,A、B、C三个区域预置乒乓球;5是能与传球电机轴相配合的套;6是乒乓球的注入口,即区域D中掏了一个孔,可以使乒乓球从此处传到发射装置去,第一个球已放于注入口正下方的进球筒底部(如下图所示);7是盛球容器的底板(裁料于2mm厚的纸盒)。传球装置的工作过程是:当第一个球被发射出后,传球电机正转,四块扇片同时旋转,从而推动乒乓球运动——原C区域的乒乓球进入注入口被传送到进球筒底部,原B区域的球到达C区域,原A区域的球到达B区域,随后传球电机停止运转。依此类推,直到三个球都陆续被注入为止,传球装置工作结束。
传球装置设计中要注意以下几点:其一,选用的传球电机最好是恒速。通过程序控制每次转动的角度要合适,即有、且仅有一只乒乓球恰好能被推送进注入口。其二,盛装球的容器外围高度要合适,防止球被抛出。即H=50mm≥乒乓球直径。其三。注入口口径稍大于球直径,且位置居区域D中央,便于球迅速注入。其四,为了减小车体重量与节约成本,外围和扇片都用薄塑料片,底板用纸质材料。
5.发射装置
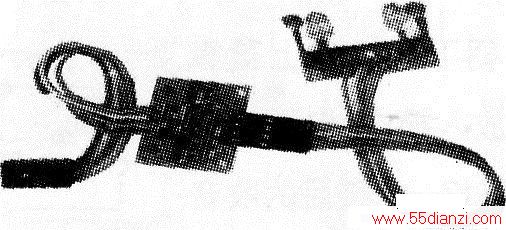
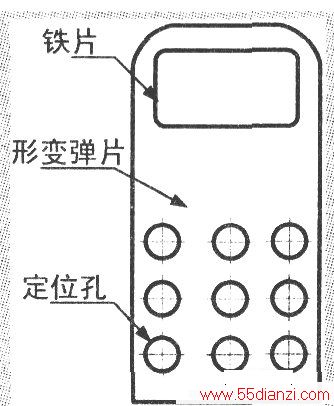
发射装置由进球简、球发射炮筒、形变弹片以及形变源等组成。整个发射装置固定在车体上。形变弹片如下图所示。由于弹片为特性钢质材料,虽韧性强,但不能被永久磁铁吸引,于是在弹片的上部位铆接了一块铁片,弹片固定端的孔供安装用。上、中、下三排孔可用来调节弹片在车体上的安装位置以改变形变弹力的大小。
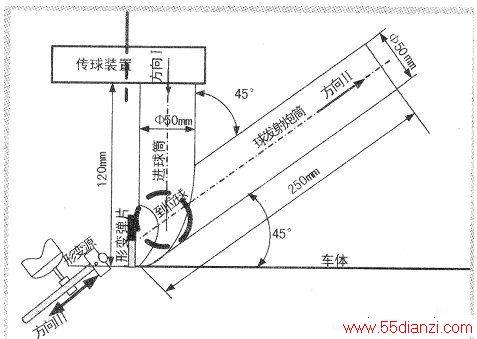
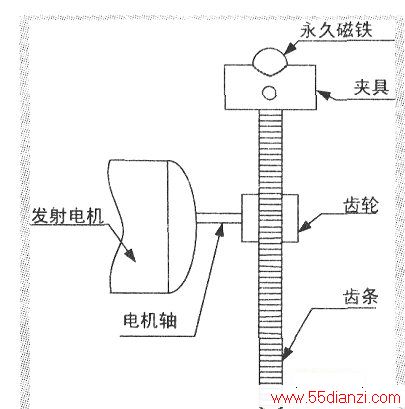
形变源,顾名思义,是指使弹片产生形变的源泉,是整个发射装置的核心,如下图所示,它由发射电机(永磁减速电动机,DCl2V,30rpm,6W)、齿轮齿条(模数m=15)与永久磁铁钕铁硼(NdFeB,如下图所示)等组成。由于磁铁为圆形,不便于直接安装,我们设计了如右图所示的夹具(厚2mm),将磁铁装配于夹具的凹槽中,夹具与齿条通过中4mm的螺钉紧固。形变源的工作原理是:发射电机转动,紧固在电机轴上的齿轮同方向转动,从而带动与齿轮啮合的齿条平动;改变电机的旋转方向就可实现齿条的进给与返回,于是永久磁铁裸露边沿就可以去靠近和远离形变弹片上的铁片。电机正转,齿条进给,当位置足够近时,铁片被吸引;吸引后,电机反转,齿条返回,弹片开始产生形变。当位置足够远时。铁片摆脱磁铁的吸引,形变弹片就会产生一个很高的速度和力量去击打乒乓球,使得球被发射出。
在发射装置中,方向I是由传球装置注入口到发射装置的传球方向。方向Ⅱ是球被弹片击打后向靶心发射方向,方向Ⅲ是齿条进给和返回方向。进球筒使球在发射前顺利到位预备,形变弹片和形变源为球的发射提供动力与初动能,球发射炮筒引导球运动方向。发射装置的工作过程是:当预置球被传送到位后,形变源工作,弹片产生形变,弹片击打球使球以高速射向靶心。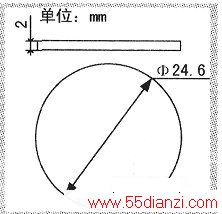
发射装置的制作有三方面创新:第一,利用“磁铁吸铁”原理,用永久磁铁使一端铆有铁片另一端固定在车体上的弹片产生形变,再用形变中的弹片击打乒乓球,使发射成为可能。第二,利用“齿轮齿条传动”特点,变电机的正反方向转动为齿条的进给与返回。从而使紧固在齿条上的永久磁铁吸引和脱离弹片,弹片可反复产生形变,使连续发射成为现实。第三,利用“一端固定的支架受力”特点,在弹片的固定端打三排孔,适当调整弹片的安装位置,可改变形变的大小及弹片击打球的速度和力量,从而可控制与调节球发射的高度和射程。使成功发射有了可靠保证。
上一篇:简易运水机器人的设计






