■设计目的
智能车主要是为完成自动寻迹功能而设计的。要求能自动识别道路、并做出相应的动作,以达到更快、更准、更稳的行驶效果。智能车采用红外传感器对路面和速度信息采样送进MC9S12单片机进行处理,通过合理利用MC9S12的功能如A/D转换模块、RTI中断等,并配合控制策略,控制车子在各个时刻的运动以达到自动寻迹目的。
■赛道检测
1.本车采用红外发射接收一体化传感器(ST178)进行道路信息采集。
2.道路信息检测电路原理图如下图。
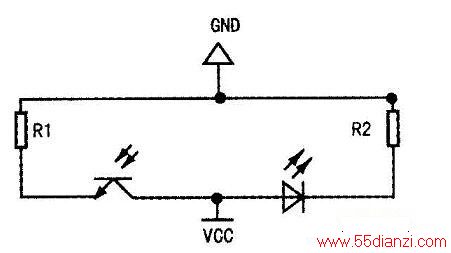
本车在检测电路中仅使用了14个红外传感器(传感器越多道路检测越精确),每个传感器都通过上图所示的电路接到单片机的A/D口上。通过对红外传感器进行选择和测试可调整最佳的感测距离。该传感器的最佳感应距离为2~ 3cm,白色感应电压大于2.5V,黑色感应电压小于1V(赛道为2.5cm宽的黑色引导线)。通过单片机A/D转换后黑色数据小于60,白色数据大于128。能够很好的识别到赛道的变化,具有较高的稳定性。
传感器位置的排布非常讲究。如采用直板排布,高速运动下智能车容易出界犯规。
我们采用了“梯形排布”方式,实验证明效果明显,有效地防止了高速隋况下智能车老出界的问题。见下图。
由于道路检测精度要高,而传感器数目有限,所以采取中间密集两边稀疏的排列方式,这样能够更好的利用有限资源来检测道路信息。
■智能汽车速度检测电路
智能汽车速度检测部分用的是鼠标中的光电对管,并配合鼠标中的齿轮使用。
检测电路的PCB板见下图。
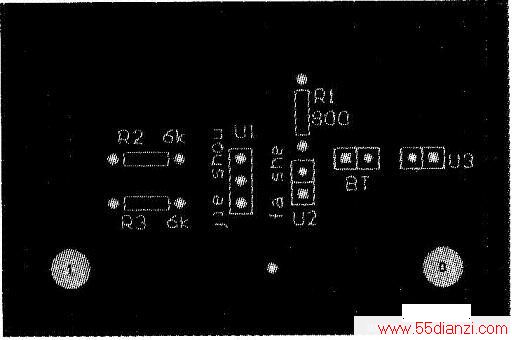
其中Ul,U2分别为红外接收和发射管。BT为电源,左边+5V右边为CND。U3为信号线。当发射和接收管中间没有遮挡时、U3为高电平,如果被遮挡U3为低电平。通过这个原理就可以检测车速。(在车轴上套一个齿轮,当齿轮随车轴转动时,齿轮J二的锯齿会不断遮挡红外线的发射和接收。这样U3上会产生频率与车轮转动频率成正比的正弦波。找到他们之间的换算关系就可以进行速度测量。)速度检测方面我们还设计了F-V转换电路。但事实证明很不成功,不仅精度低、而且,还出现了一定程度的数据延迟,这对赛车的影响是相当大的。
最后还是选择将传感器采集出的信号、直接通过单片机的一路A/D进行采集分析。效果比较满意。此疗案能够及时有效地实现速度的采集与控制。
■智能汽车电机驱动电路
介绍驱动方案有很多种
1.专业驱动芯片驱动
可以使用比赛组委会推荐的MC33886,它的优点是简单、可靠,只要按照PDF说明连接电路就行。缺点是集成元件散热效果不好、须外加散热片。并且导通内阻偏高,不利于电机的瞬时响应。
改进方案是将多片MC33886并联,以减小导通内阻。
2.分立元件搭建驱动电路
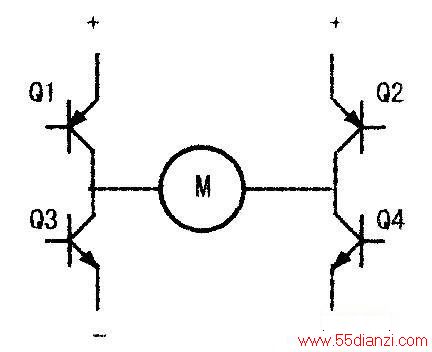
我们采用分立元件搭建驱动电路,下图所示为H桥方案:通过Ql、Q4或Q2、Q3同时导通来实现电机的正反转,并通过电机反转实现赛车减速。
H桥驱动电路的PCB板见下图。
由于驱动电路的导通内阻对车的性能影响极大(影响瞬时响应速度),在高速情况下O.Ols都可能决定你的成败,因为当车速达到2m/s时、O.Ols你的车就出界lcm了。所以我们选择并管来减小导通内阻。并月,选用的都是低导通内阻的管子(p60n06和IRF9640)各种驱动我都做了实验,1298也是集成驱动芯片。
用它搭成的驱动电路效果很差,不仅驱动无力而且芯片发热严重。mc33886也没能达到预期效果。只有分立的H桥效果理想。
■车载电源
作为一节电池供电的车来说,电源部分也是相当重要的。选用低压差稳压芯片是必要的,我们选择LM2940 -5V稳压芯片。实践证明,选用此种方案能够出色完成任务。单片机在很大电压范围内都能稳定工作。LM2940-5也是3端稳压芯片,其用法和7805相同,电源PCB板见下图。
●舵机的作用和工作原理
小车靠舵机控制转动方向来转弯。舵机的工作相当简单,它是一个脉宽控制器件。在其控制线上输入一个周期50Hz的PWM信号,舵机的转角同输入信号的脉宽呈线性关系。45度对应1100μs脉宽,O度对应1500μs脉宽,45度对应1900μS脉宽。
改变脉宽时、舵机转角自动变化到对应值。舵机的标准工作电压是6v,但比赛中为了提高舵机的响应速度,我们把它直接接在电池上,采用7.4V供电。
■小车的控制算法
本车采用分段查表的方法,转弯采用大弯、中弯、小弯的控制方式。针对不同的道路检测信息,采用不同的转弯和速度数值来控制小车行驶。例如14个传感器的值是00000001100000(1为道路检测所在位置),即可确定跑道位置并配合当前速度的采样值作出相应控制。
例如当速度很小时,转弯相对灵敏。相同的道路信息我们让舵机转角小些。而当速度较高时、惯性很大,我们要相应改变算法,即使道路检测偏差很小,我们也要以很大的角度转弯。否则赛车一定会冲出跑道。
为达到最好的效果,要不断反复实验,测出各种曲率赛道上小车的极限过弯速度并不断修改参数。力求所有情况小车都能以极限速度过弯。这就要求算法的准确性。可惜以光电管检测的精度实现上面想法很困难。
所以下一代车我们决定采用CCD摄像头检测道路信息。这样能够精确算出赛道的曲率并调整车速与转弯角度,有望实现完美的通过弯道。使用摄像头能够大大提高小车道路的前瞻性。这对速度比赛是很重要的。提前减速,提前转弯,以最大半径人弯都是以大前瞻性为前提的。
实践也证明了这点,所以在本次设计所有使用摄像头的队伍占有压倒性优势。
本文关键字:智能 机器人-智能车,电子知识资料 - 机器人-智能车






