一、系统实现功能及组成
1.实现功能
电动车可在表面贴有白纸、中心有黑色引导线的跑道上自动行驶,跑道总长200cm。电动车从起点出发,行驶到一半路程时减速,到达终点后,发出声光报警,电动车前进时实时显示行驶用时和行驶路程;在终点停留5s后,仍按先高后低的车速沿原路线返回,电动车返回时实时显示行驶用时和行驶路程。
2.系统组成
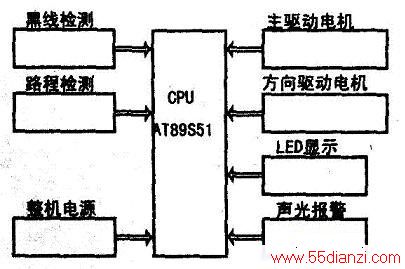
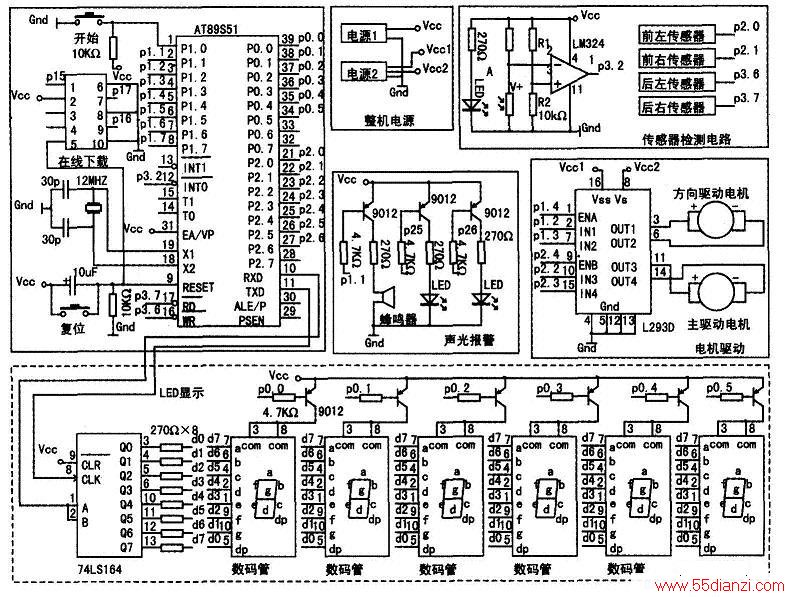
本系统由硬件和软件两部分级成。硬件部分由AT89S51作为电动车的控制核心,包括黑线检测、路程检测、主驱动电机、方向驱动电机、LED显示及声光报警模块等几部分。主要完成电动车行驶所需的信息的采集、转换与显示,声光报警、电机驱动等功能;软件部分主要实现信息的处理、设备的驱动、调速、控制等功能。单片机AT89S51查询传感器获得行驶信息并处理后控制电动车行驶状态,实时显示电动车行驶用时与路程。下图为智能电动车系统框图。
二、硬件结构及原理
1.控制核心
通用单片机芯片AT89S51作为主控单元,接收并处理传感器发出的各种信息,从而控制电动车在自制的跑道上行驶,并完成时间、路程的计算与实时显示。
2.黑线检测
(1)原理
黑线检测的原理是利用光的反射原理,即当光线照射在白纸上时,反射系数大,而光线照射在黑线上的反射系数小,这样就可以判断电动车是否脱离跑道。考虑各传感器会对单片机产生一定的干扰,因此采用电压比较器LM324对信号进行隔离,保证系统工作的稳定性。
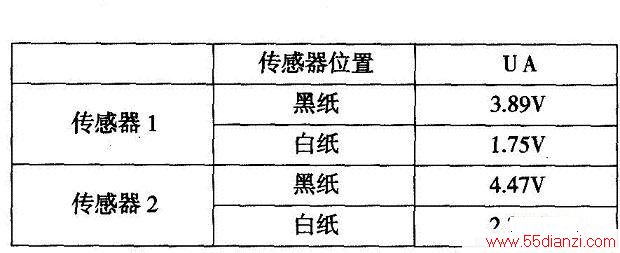
选取高亮度发光二极管和光敏电阻,自制反射式光电传感器。光敏电阻用于检测黑、白线,高亮度发光二极管用于照亮以抵抗自然光线的干扰,提高传感器的灵敏度。下图传感器检测电路中A点电压送入电压比较器的反相输入端V-并与同相端的电压V+作比较,电压比较器输出低电平时传感器位于黑线上,输出高电平时传感器位于白线上。下表是两个传感器的实测数据,为了准确地区分黑纸和白纸,提高精度,应为每个传感器选取合适的同相端电压v+,一般为传感器位于黑、白纸所测两个电压的平均值。传感器1可取V+=2.8V,传感器2可取V+=3.4V,根据V+=VCC/R1+R2×R2可选取合适的Rl、R2。因为元件参数的离散性,表1中实测数据差别较大,因此依实测数据为每个传感器选取分压电阻,或串接精密电位器进行实际调整。为了提高传感器的灵敏度,制作传感器时可将发光二极管和光敏电阻外套塑料管。
(2)传感器安装位置
为保证电动车沿黑线往返行驶,在电动车的前、后的中心线两侧等距离安装两个传感器,两个传感器之间的距离应略大于跑道寻迹线的宽度。传感器与地面的距离不同时,测出的数据也不同,离地面越近,位于黑纸和白纸时测出的电压差越大,精度越高,表l所测数据传感器距地面0.5cm。
3.路程检测
(1)原理
利用和黑线检测相同的自制反射式光电传感器检测行驶路程或车速。通过计算车轮所转的圈数间接得到行驶路程,为了提高精度,在黑色的后车轮内侧等距离粘贴4小块白纸,并测得车轮周长L为20cm,车轮转动时,每经过一个白纸,就会产生一个脉冲,认为电动车前进了5cm,给存放行驶路程的单元加上5cm,适当的转换形式后,可实时地显示出电动车行驶的路程。测量车速时,可统计出Is内产生脉冲的个数n,则每秒车轮转n÷4圈,将该值乘以60可得到每分钟车轮转60n÷4圈,则电动车的每分钟行驶的路程为(60n÷4×L)cm。增加白纸的数量,可提高测量精度。
(2)传感器安装
位置传感器需要安装在车轮内侧易固定的地方,与车轮的距离小于lcm,不影响车轮转动为好。
4.电机驱动
电动车上的前电机用于控制电动车转向,后电机驱动电动车行进。电动车上使用的直流电机装有减速齿轮组,可采用集成驱动芯片L293D,二个通道可同时驱动前、后两个电机。该芯片利用TTL电平直接控制,可直接与单片机AT89S51的I/O口相连,通过编程改变控制端状态可方便地对电机的行驶速度与方向进行控制。采用PWM技术编程改变控制脉冲的占空此,可精确调整电动车的车速。初始占空比可取0.8,降速后取0.5,控制脉冲的频率在400Hz以下,电动车运行平稳。
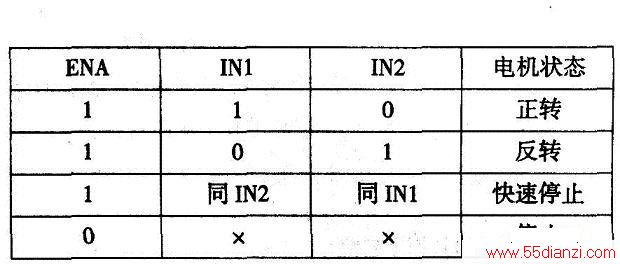
L293D的额定工作电流达1A,最大可达1.5A,Vss与Vs的最小值为4.5V,最大值为36V。经过实验,Vs电压应高于Vss。驱动电路如上图所示。下表为L293D的功能表。
5.显示部分
该模块由单片机控制实时显示行驶时间与行驶路程,需要六个LED七段共阳型数码管。显示效果直观、明亮、经典电路无需复杂调试。为了预留出足够的I/O口用于功能扩展,单片机与数码管之间用串口发送字形码。电路如下图所示。
6.电源与报警电路
采用两路电源分别为控制电路和电机供电,彻底解决电机运行对系统稳定性的影响,从而提高了系统的可靠性。
单片机驱动发光二极管作光报警,驱动蜂鸣器作为声报警。
三、软件设计
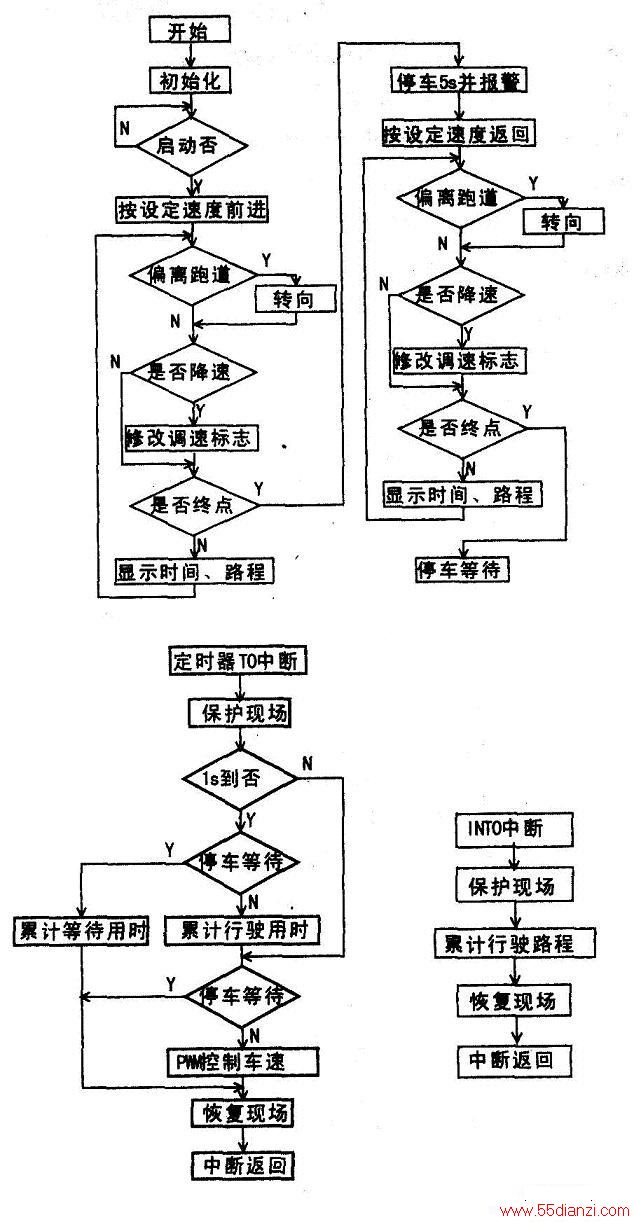
软件分为主程序、中断服务子程序、显示子程序等。定时器TO采用中断方式定时Ims,在中断服务子程序中累计行驶用时及车速控制,外中断IN-0检测路程,在中断服务子程序中完成路程的累计(也可在主程序中用查询方式实现),主程序完成系统硬件初始化、子程序的调用并查询传感器控制电动车行驶方向,并设置复位和开始按钮。系统软件采用汇编语言编程,用伟福软件编辑、编译、仿真后在线下载。上图为主程序流程图,下左图为定时器TO的中断服务子程序流程图,下右图为外中断INTO的中断服务子程序流程图。