一、开发设计智能机器人背景
众所周知,单片机是一切智能电子产品的基础和核心控制部件.应用航天技术,现代通信技术、机电一体化,汽车、模具。数控、家用电子、智能玩具等各个领域。单片机技术是一个综合技术,包含着硬件设计安装和软件编程诸多内容,因此要学好单片机技术就必须掌握软件编程和硬件设计。
二、智能机器人的设计开发过程
(一)设计思路
要想设计一个由单片机控制的机器人,主要完成两大任务:即硬件的设计和软件编程。
(二)硬件设计
1、单片机种类的选择:
单片机的型号和种类很多,在我国市场流行最多的还是美国In-tel公司生产的MCS-51系列单片机,其价格低廉得到了许多产品生产商的青睐,如一个Atmel公司的8位AT89S52市场价格在7元人民币左右。
2、组件的选择原则:
组件的选择主要考虑的是:价格与组件的完整性。要能充分使用光、声效果给人一种直观、形象的感觉。
下面是一个寻找黑线的机器人的硬件电路图。
(三)软件设计
1、功能流程图的确定:

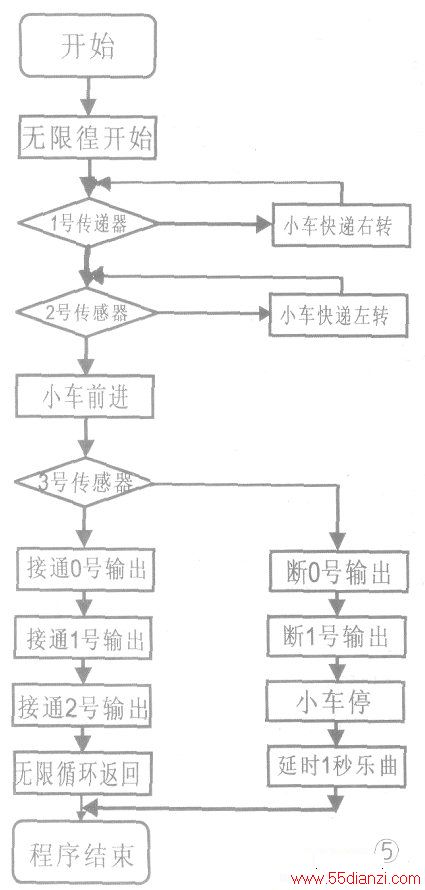
功能流程图的确定是机器人设计开发的关键,但要想让机器人做什么就要靠软件编程了.软件编程的第一步就是确定功能流程图.下面给出机器人寻找黑线的流程图。
功能流程图的确定是机器人设计开发的关键,但要想让机器人做什么就要靠软件编程了.软件编程的第一步就是确定功能流程图.下面给出机器人寻找黑线的流程图。

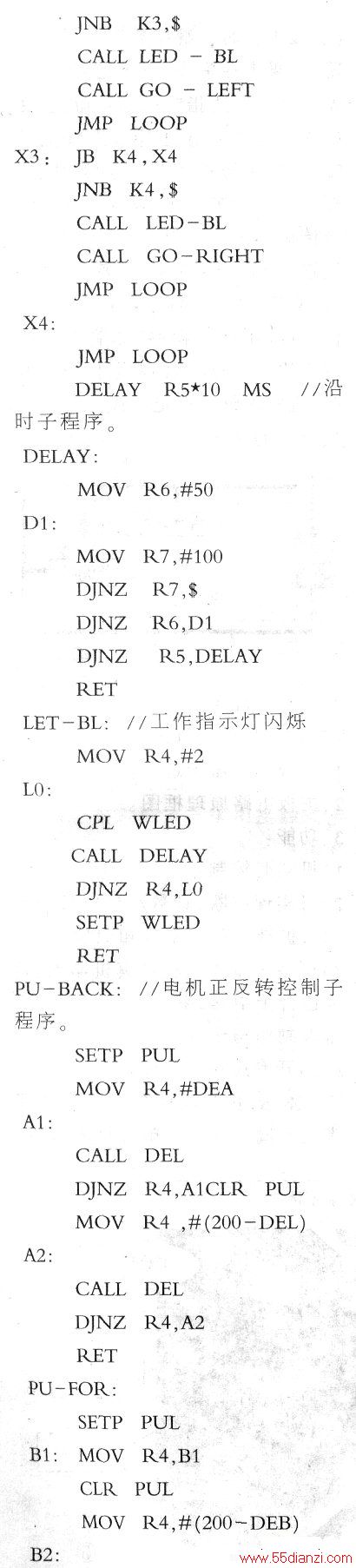
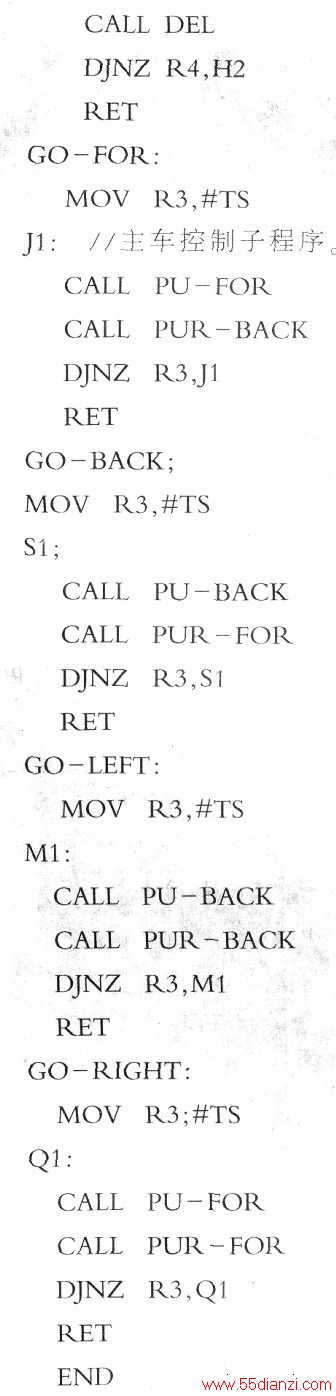
2、会寻黑线的机器人的软件程序:


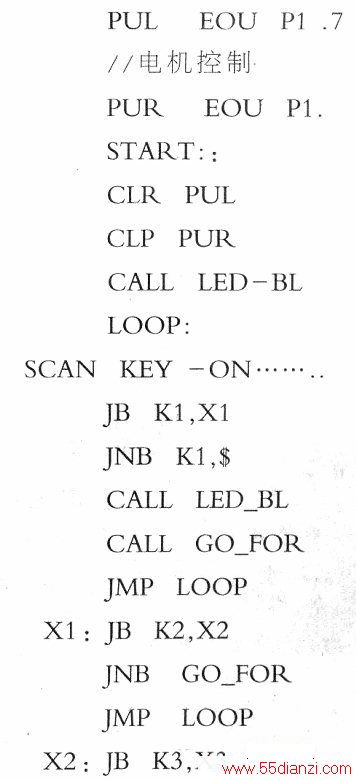

此软件程序看上去比较复杂,如果使用C语言编写就简单得多,但作为技工学生,作者建议使用汇编语言编写.因为它直观易学。
下面我们给出项目的部分模块。
三、寻线机器人的工作原理如下表所示
(一)寻找黑线的工作原理:
1、寻线原理:
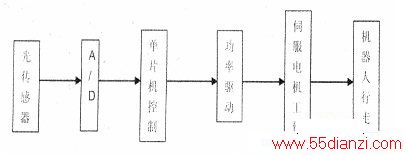
本电路采用AT89C52单片机为核心.在32个I/O口中,定义8个输入口,12个输出口。在12个输出口中,2个输出口控制一个电动机(一个正转,一个反转),这样可控制6个电动机。采用在线软件下载。程序开始,小车(机器人)进入无限循环运行状态作直线行走,1号光敏反射传感器进入信号(黑线)判断状态。看是否行走在黑线上(用有无信号区别);无信号时表示已走出黑线。小车快速右转,再进入无限循环继续前进:如果有信号接着判断2号光反射传感器.如果无信号表示脱离黑线,小车快速左转进行修正,如果有信号小车继续前进。这样保证了小车(机器人)自始自终行走在黑线上。
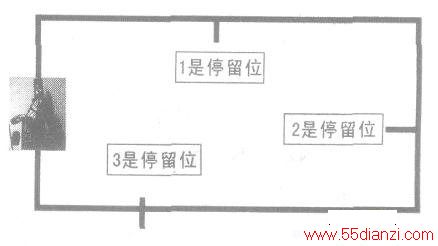
2、灯光与音乐
为了在机器人工作中增加效果,可以由程序设计者自行开发灯光与音乐,当机器人小车沿着上述程序运行时加入3号传感器,在黑线圈内改置1~2点停留位置。(如图)小车在修正两个电机(正反)转(黑线上)时,继续判断3号传感器,如果走在黑线上(无信号)也就表示没有到达指定的停留位置,由单片机0号输出,1号输出口,2号输出口,3号输出口点亮彩灯,灯按一定方式布置在小车上。如果3号传感器有信号表示到达了指定位置,断开一部分输出接口(如、1号、3号)灯光闪烁小车停下(延时1秒)调用音乐程序(本音乐程序使用的是我校校歌)然后回到主程序,机器人继续行走黑线。
3,行走的路线图:
4、信号流程图:
(二):主板电路框图:
1、主板接口器示意图:
2、主板电路原理框图:
3、功能:
1)机实时控制:
2)可实现中断,计数/定时。接口技术与扩展等单片基本知识学习
3)可用于制作各种仿真机器人,特别适合于中学。技校等进行简易机器人制作与比赛。
(三)开发应用与拓展:
本板功能强大在设计时为了满足不同层次学习单片机人员的需求,已经考虑到扩展功能:如:
1、如果传感器采用接触式传感器可用于制作能够避开物体的多脚怪。
2、如果很好的利用串行数据接口多机通行方式可于16位机制作出入机对话的简易机器人大大提高制作兴趣、实现语音控制3、当我们把所有的输出接口用上外接6台伺服电机配合光敏传感器可设计制作服务机器人:能够进行端茶倒水服务。
4、采用6个接口、4台电机可实现或仿真工厂自动流水线上的分检产品机器人。
5、车外观设计上,可由设计人自行决定方案比如:外接(1)显示(中文字样的)可制作出:同时只有显示与动作的机器人,总之:使用、范例举不胜举都有待于我们开发设计;另外寻找黑线如果把程序改进一下,行走的路线就可多样化了。我们可以反过来寻白线.制作出不跳崖的机器人,放在一张带色的桌上它就不会掉下而在桌面任意行走,也可以走一个字样出来。
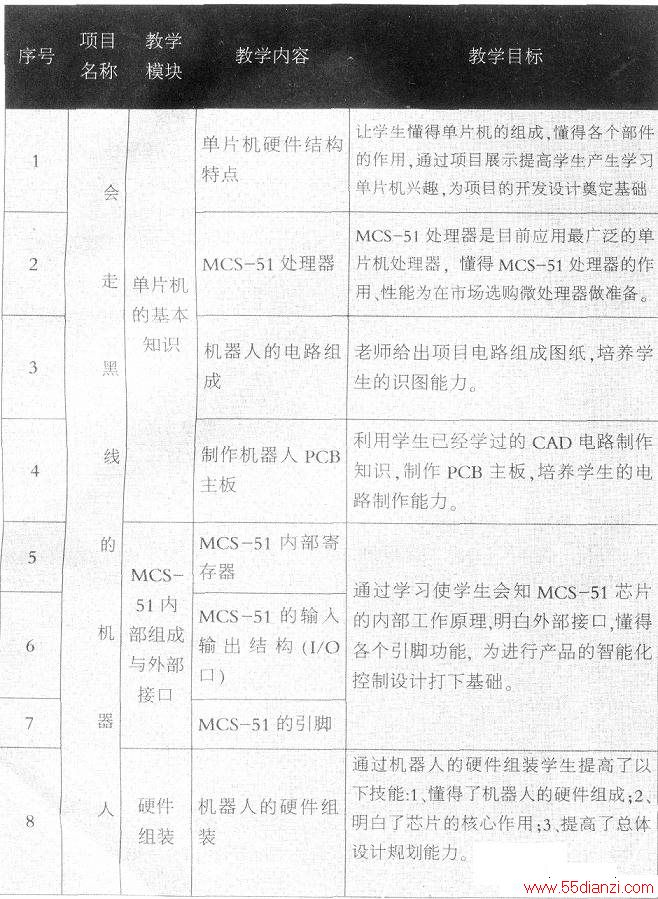
通过“会走黑线的机器人”项目学习,培养了学以下技能:
1、产品系统设计能力:
2、电路的识图能力:
3、电路板制作能力:
4、焊接能力:
5、元器件的选购能力:

本文关键字:智能机器人 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:设计机器人射门比赛的思路






