在机器人领域里,手又被经常称为手钳(也叫操纵端),因为这个词语能够比较接近的描述它的功能。用电机控制的机器人的手难以像人手一样很好地操纵物体,它们只是简单地抓住或夹住物体,所以称之为手钳。所以手和手钳常常混用。
手钳的设计有很多种,但是没有一种简单的设计能够适用于所有的应用。
每一种设计只是在某一方面比其它设计有优势,你必须要为你的应用选择合适的手钳。这一章简单介绍几种对机器人比较有用的设计。大多数都很容易制造,有些甚至是用一些便宜的塑料玩具制作的。机械手的设计包括手指的设计和抓取机械的设计。本文最后一节将详细介绍怎样将手腕的旋转加入到机械手的设计中。
夹板式机械手设计夹板机械手是一种常见的设计,它的优点是结构简单,制做容易。你可以用金属、塑料、木头或者同时使用这三种材料来设计它。下表给出了一个金属、塑料夹板的详细资料。
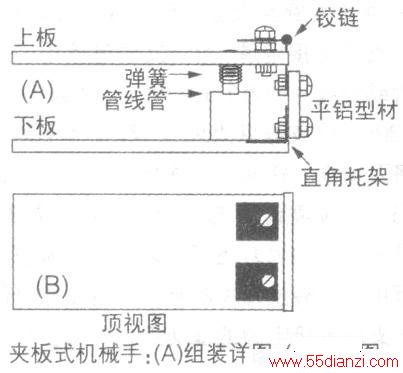
夹板摆动部分由一个腕关节组成(这部分,将来要永久装在机器人的前臂上)。两个塑料圆盘连接到腕关节上。
下面的一片是固定在腕关节上的,上面的则是活动的。它们两个中间是一个小的弹簧负载的螺线管。当螺线管没有加电时,弹簧使两个盘片分开,这时手钳是张开的。反之,手钳闭合。带有螺线管的手钳末尾的移动量非常小,大约只有0.5英寸长。虽然如此,这已经能够应付一些常见的抓取任务了。
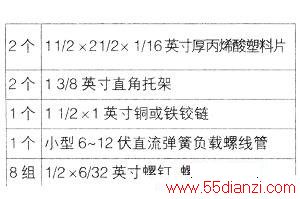
切两个1门6英寸厚11/2英寸长21/3英寸宽的丙烯酸塑料片。将下面的一片附在13/8英寸直角支架上。然后将支架放置在距板边缘1/8英寸处。
使用6/32x1/2英寸的螺栓和螺母紧固。再截取一条11/2英寸长1/2英寸xl/8英寸的条型铝材,如图所示,将两个支架装配到铝型材上。上面的板用一个11/2英寸长1英寸宽的铜或铝的铰链安装。铰链上用28#钻头钻孔以穿过6/32的螺钉,用1/2×6/32英寸螺钉、螺母拧紧。
螺线管的选择非常重要,因为它必须小到能放进两个翼板之间,并且底部要平,这样才便于组装。还有它必须能够使用你的机器人的电压的操纵,通常是6到12伏。有一些螺线管用固定法兰盘代替了铁芯。如果你使用这样的,那么可以用法兰盘把螺线管固定在上面的板上。否则就把螺线管安装在下面的板的中间距后端1/2英寸的地方(靠近支架),然后用高强度黏结剂将它固定住。
接下来来校准螺线管上面的板。在螺线管的铁芯接触板的地方做一个标记。钻一个孔,其大小能够刚好适合铁芯。然后将铁芯从孔中放下。最后调整两个翼板,使他们互相平行。
把铰链中的孔作为引导,对应的可以标记出铝条上的孔。钻完孔之后,用螺栓和螺帽安装好铰链。手钳最后的样子应该如下图所示。
现在通过控制螺线管来测试一下手钳的操作。如果铁心松动,就用一些黏合剂加固它。你也可以向手钳前端加一些小片橡皮之类的东西,使它能够更容易地抓住物体。你还可以粘上去一些方的橡胶脚,它们在很多五金和电子用品商店中都可买到。
两个手指的机械手
两个手指的机械手由两个可移动的手指组成,它有点象龙虾的钳子。本节详细叙述制作一个基本和两个高级模型的步骤。
一、基本模型
为了容易制作,基本型两个手指的机械手由特别的装配组件(也可以用熟悉的装配玩具组中的元件)组成。截两段41/2英寸长的金属梁(因为这是标准装配件的尺寸).再截一段31/2英寸长的直角梁.然后用6/32xl/2规格的螺钉和螺母做两个旋转接头。再截两段3英寸长的梁固定手指和角梁(参考下图)。在角上磨掉一点不让它们二者互相接触。
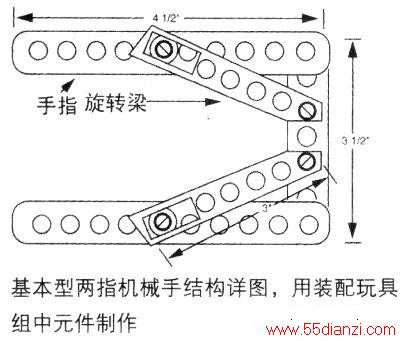
在梁的一端磨或剪通出两到三个孑L,形成一个槽,如下图所说明的。用两个6/32xl/2规格的螺钉和螺帽在手指上做出两个旋转接头。
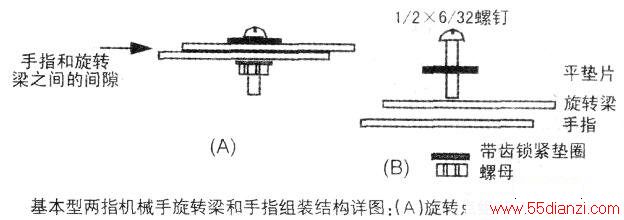
这样基本的机械手就完成了。你可以用几种方法使用它,一个方法是在直角梁的两个旋转接头之间钻孔,再把两根钢缆或线穿过孔连到旋转接头上,把钢缆的另一头连在螺线管或者马达的轴上。当马达或者螺线管不启动的时候,用一个轻压力弹簧使手指分开。
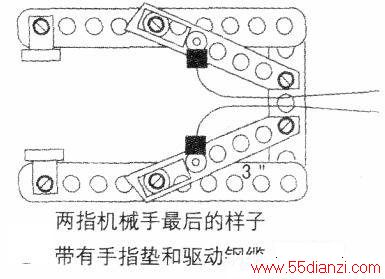
你还可以用大多数装配玩具组中都有的支撑脚为手指加上垫片,然后在支撑脚上粘上防雨条或橡胶。最终的手钳的样子如下图示。
二、高级模型1
可以用很容易买到的塑料玩具并把它改为机器人手臂上的很有用的两指机械手。这个玩具是塑料的‘延伸手臂’,其一头是两个夹钳,另一头是一个手柄。要夹紧钳子,只需压紧手柄即可。
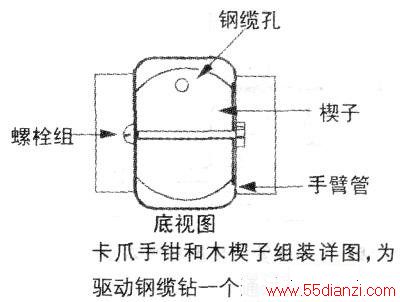
在腕关节以下3英寸的地方切断手臂,将截下一根铝管。现在将手臂的管子再截去11/2英寸长,但不要截去钢缆。然后将管子口锉平,做一块11/2英寸长、3/4英寸直径的楔子嵌入矩形的手臂。在上面钻一个孔以便钢缆能够穿过。钢缆孔是偏心的,因为它要接到驱动手臂的机械上。将钢缆穿过小孔,再把楔子插入手臂1/2英寸以上,最后钻两个孔以固定楔子的位置(见下图),用6/32×3/4螺栓和螺母固定这些零件。
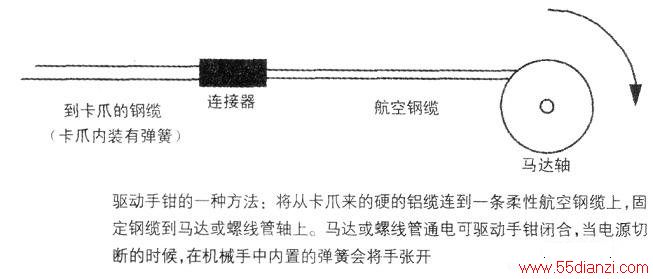
现在可以用楔子将手安装到手臂组合上。这里可以用一个3/4英寸长的U型或平螺钉将楔子直接连在手臂上。机械手的张开和闭合只需拉动7/16英寸。可以将机械手上的钢缆连到一个冲程至少7/16英寸的螺线管的衔铁上。也可以将机械手上的钢缆连到1/8英寸的航空钢缆上,可用14到16号线的接线卡子将其端到端地连接(下图)。再将航空电缆绕到马达和螺线管的轴上,给马达或螺线管通电可驱动手钳闭合。当电源切断的时候,在机械手中内置的弹簧会将手张开。
三、高级模型2
这个机械手的设计是用一个新型的蜗轮实现,并不需要硬的好的(贵的)蜗轮。这个蜗杆是一个长1/4英寸的20号螺栓;蜗轮是标准的直径1英寸64牙的铝制正齿轮旋转螺栓就能够开合机械手的两个手指。
为了做这样一个机械手,要准备两个3英寸长的槽铝型材。以T型加强平板做底,如下图所示,将手指和齿轮固定到T型板上。安装齿轮的洞之间的距离的是严格地按照所用齿轮的直径来设计的。如果你安装的齿轮直径不同,则需要调整洞间的距离。务必确保手指能在底座上灵活地活动,而活动余量又不要太大。太大的活动余量会使齿轮卡死或跳过。
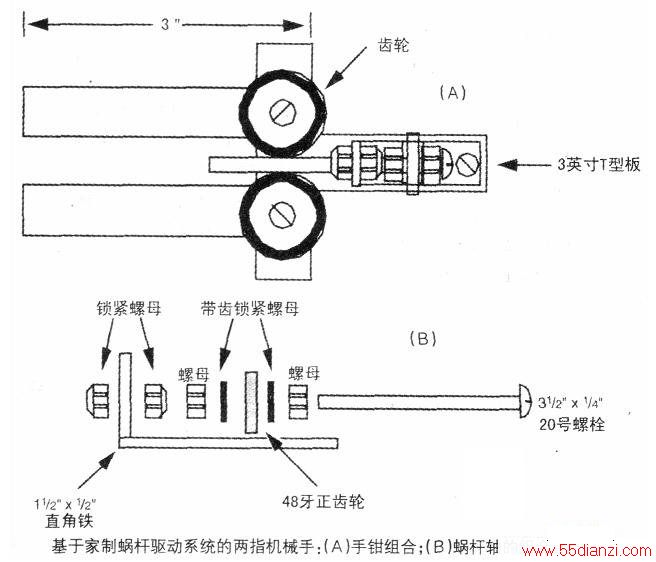
用—个11/2英寸长1/2英寸宽的角铁支架来固定轴。用螺栓和螺母将它固定在T型板的中心。在T型板和支架上加一个#10的垫圈以增加蜗杆的高度,最后用一个31/2英寸长1/4英寸20好机螺栓穿过支架,用成对的螺母或锁紧螺母形成-个可以自由旋转的轴。不要将螺栓锁定在支架上,但应尽可能的减少余量。
校正两个机械齿轮,使它们能同时张开和闭合。
为了控制手指的动作,在蜗轮轴座上加一个马达。这个机械手的样机中就是用一个直径1/2英寸48齿正齿轮和驱动马达上的直径1英寸48齿的齿轮相配合。当马达朝一个方向转动的时候,手指闭合;当它朝另一个方向转的时候,手指张开。在手指的侧面加上一些橡胶垫片以便于抓住物体。
本文关键字:机器人 机器人-智能车,电子知识资料 - 机器人-智能车
上一篇:为机器人设计一条极坐标手臂






