极坐标型手臂用于单独工作的机器人的操作是较理想的。相当便宜而且容易制作,并且能适用于很多场合,尤其是机器人训练。在本文中所描述的设计,是一种安在固定底座上的具有三个自由度的极坐标手臂。如果需要,也可以把手臂安在一个可以移动的底座上,甚至可以给它安上轮子或给底座加上轨道,并且制作一个巨大的可以旋转的手臂,组成一个吓人的玩意。
这种手臂的设计中不包括抓取器、手或其他机械装置。你可以把几种不同的机械手安在手臂的末端。根据你自己的应用来选择这种机械手。
一、构建底座
底座面积为10×12英寸。样机是由标准的铝支架制作的,见下图。你也可以用这里推荐的41/64×1/2×1/16英寸的槽铝型材,截取四条10英寸的和四条12英寸的铝型材制作底座。把末端都切成45度角。截取四条21/2英寸的起支撑作用的型材。它们的末端不要做斜角。用11/2×3/8英寸的平角铁把上部和底部框架连接在一起。用8/32×1/2英寸的螺丝和8/32的螺母把型材固定在弯角铁上。
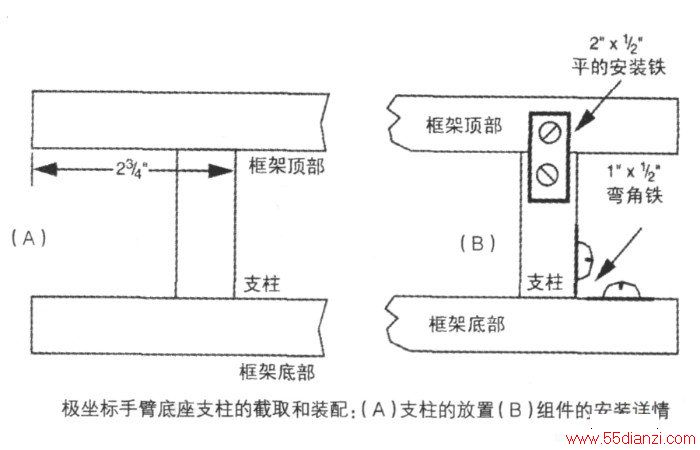
如下图。用8/32×1/2英寸的螺钉和螺母把1×1/2英寸的弯角铁固定到每一个短的支撑柱上。用8/32×1/2英寸的螺钉和8/32的螺母,通过与角上,距离2 3/4英寸的支撑柱把上部和底部框架连接起来。
二、肩部旋转装置
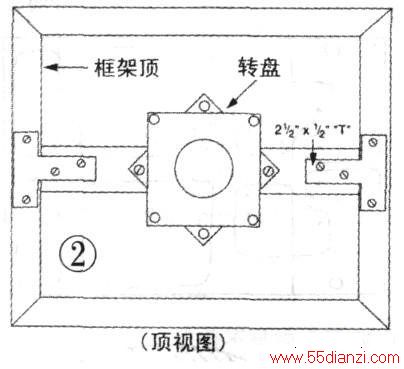
肩部旋转装置由一个电动机,一个转盘,和一个链轮传动系统组成。通过给底座的上部添加一条横梁来开始。截取一条105/8英寸长的57/64×9/16×1/16英寸的铝型材。用两个21/2×1/2英寸的平的T型安装铁把它纵向安装在底座的中心。用8/3×21/2英寸的螺钉和8/32的螺母把丁型铁和横梁固定到它们的位置。
在横梁的中心钻一个3/8英寸的孔。在这个孔上安装一个直径为3英寸的有球状轴承的转盘(像旋转餐桌)。以转盘的基本平台上的安装孔作为引导,标记横梁上相应的安装孔位置。钻一个6/32螺钉(#28号)的孔,用两个6/32×1/2英寸的螺钉和螺母固定转盘(见下图)。
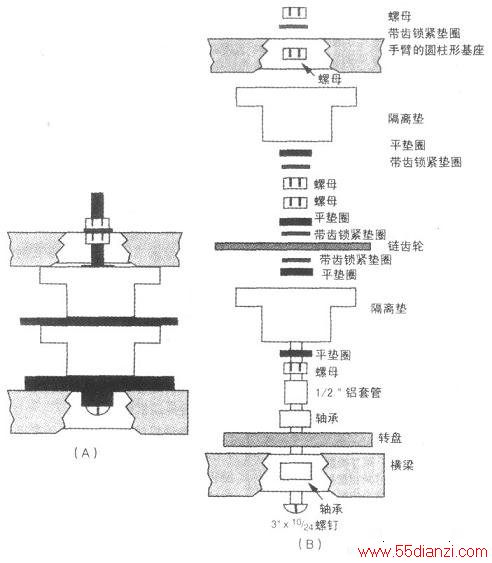
用一个3xl0/24英寸平头短螺栓来构建手臂的中心轴。在横梁的两边各安装一个直径为1/2英寸的轴承。确保轴承的中心(转动部分)搁在洞上,否则它们将不能顺利的转动,并且螺钉的头部装在轴承内圈上。加一个1/4英寸的隔离垫,并用10/24的螺母把组件紧固到位。
现看一下驱动装置。驱动链轮(35牙,直径3英寸,#25号的链条)夹在两个塑料的隔离垫中间。
这些隔离垫实际上是壁橱横杆的支架。
在它们的中央已经钻有孔了,因此你只需把它们安在轴上。驱动链轮应该距横梁上端大约一英寸。用10/24的螺钉和带齿的锁紧垫圈和一个平的垫圈把驱动装置锁紧并固定好。
把一个20齿直径为13.4英寸#25的链轮安在电动机的轴上。样机的手臂使用的是一个有1/4英寸轴的中等负载步进电机。链齿轮标称1/2英寸的轮毂用轴套缩小为1/4英寸。如果你使用类似的电动机和相同型号的链齿轮,那么链条的标称长度应该是17英寸。你可以用一个稍微长一些或短一些的链条,因为你可以使电动机安装位置沿框架的长度进行调节。
装上链条后再使链轮适当的定位。
沿着框架的边移动电动机,直到链条拉紧(但是不要太紧),并标记下安装位置。在这个记号处,用两个11/2英寸×3/8英寸的平的直角支撑把电动机安在框架上。用1/2英寸的隔离垫把支撑垫起。用6/3×21/2英寸的螺钉和螺母把电动机固定在支撑上,再用8/3×21/2英寸的螺钉和螺母把支撑固定在框架上。
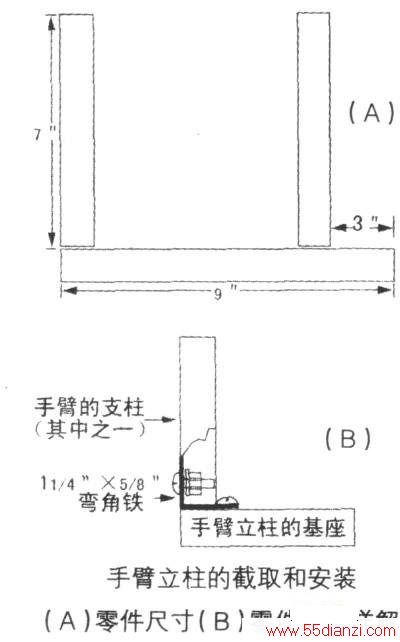
用两个7英寸的和一个9英寸的57/64×9/16×1/16英寸的槽铝型材制作手臂的立柱。把一条7英寸的梁平接在9英寸梁的末端。用11/4×5/8英寸的弯角支架和8/3×21/2英寸的螺钉和螺母把它们固定好。把另一个7英寸的梁平接在距9英寸梁的另一端3英寸的地方(详见下图)。同样,用一个弯角支架把它固定好。在9英寸梁的中心处钻一个孔,并像图中所示那样把组件安装在肩部的旋转轴上。
三、制作肘装置
肘装置是由一个被步进电机驱动的平台组成。为了分散重量,把电动机安装在9英寸的肩部零件上。见下图。
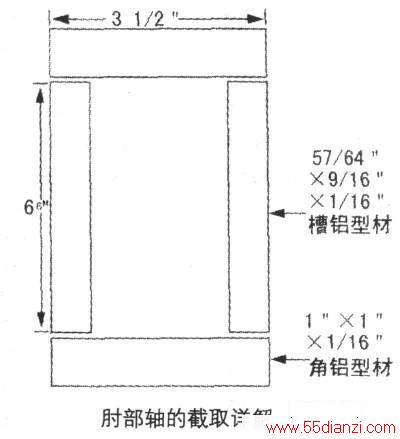
制作肘的平台需要截取两条6英寸长的57/64×9/16英寸x 1/16英寸的槽铝型材,用两条31/2英寸长的1×1×1/16英寸的角铝型材把它们连在一起。用1/2×8/32的螺钉和8/32的螺母连接它们。
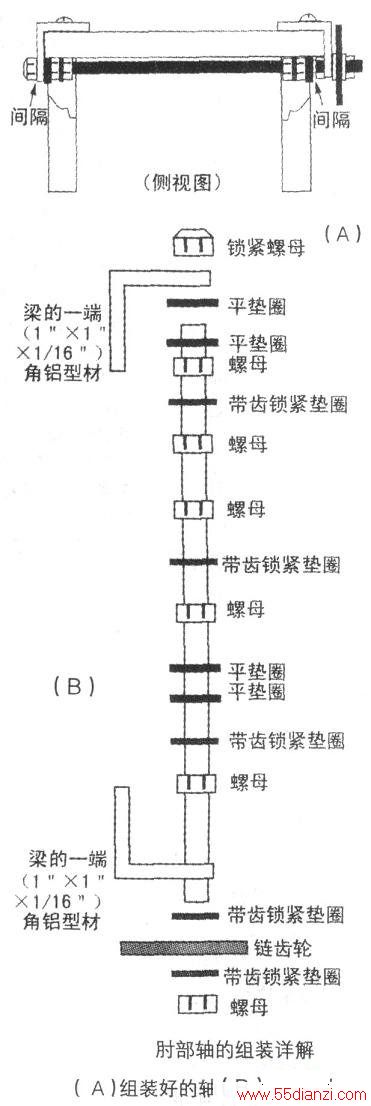
在每一条角铝型材的中心钻一个1/4英寸的孔作为肘部旋转轴。截取一条7 1/2英寸长的1/4英寸20的全螺纹杆,并且在它的末端安装一个锁紧螺母。在每条7英寸的手臂支柱的顶部向下1/2英寸处钻一个1/4英寸的孔。用在下图中标注的金属件把这些零件穿过肘部旋转轴。在末端安装一个20牙直径为11/2英寸的#25号链轮。
在肘部的步进电机的轴上安装一个匹配的20牙#25号的链轮(它和在肩部旋转部分用的是同一型号的)。在两个链轮间安上一个17英寸长#25号的链条,并且用21/2英寸长的1×1×1/16英寸的角铝型材把电动机安装在9英寸肩部横梁的末端。用6/32×1/2英寸的螺钉和螺母把电动机固定在角铝型材上。角铝型材用铆钉铆在横梁上(机械螺钉的头部太厚)。
四、制作前臂
使用一个金属伸缩梁来制作这个可收回的前臂。如下图所示,这个伸缩梁由两条组成:一个1 1英寸的基座和一条16 3/4英寸长的可伸缩梁。伸缩梁安设在装有滚珠轴承的基座上。如果加一点润滑油,伸缩梁就可以沿着其长度顺利地滑行。在样机中使用的伸缩梁不需要任何的修理,但是有时轨道有些小的阻塞或锁死,可能需要磨合。通常,只需磨下一些金属及钻出止动的挡孔。
钻出与已经装在肘部平台的螺钉相配合的安装孔(可能需要去掉里面的梁以便露出基座的这部分)。把链轮反面的螺钉松开,把伸缩梁安上,再把螺钉上紧。
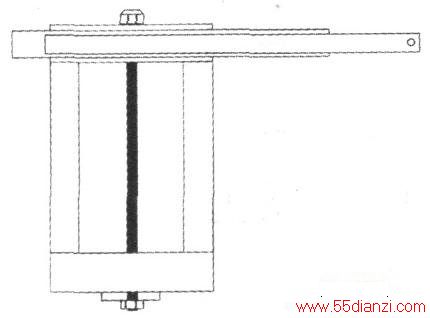
把伸缩梁的电机直接安装在肘部平台的中央。截取另外的3 1/2英寸长的1×1×1/16英寸的角铝型材,并用8/32×1/2英寸的螺钉和螺母把它安在平台上。用最适合的安装方法紧固电机。在样机中手臂所使用的步进电机在轴的末端已经有带螺纹的安装孔。用它们来固定电动机到位。
在电动机的轴上安装两个直径为1 1/2英寸的传动齿轮。安置这些齿轮使它们的轮毂彼此相对。这是用来为前臂的钢缆创建一个像线轴似的轴。作为代替,也可以使用链轮或者用金属或木头制作一个真的线轴。
设计中主要的注意事项是线轴的内部必须是平的。凸起的止动螺丝会和电缆绞在一起。
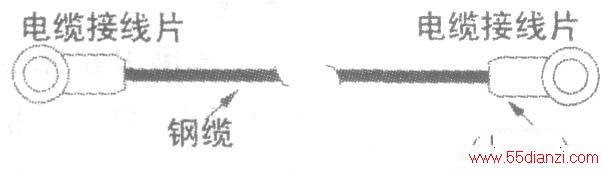
截取一段大约18英寸的周长为1/16英寸的航天用的钢缆。用一副老虎钳或其它钳具在两端都安上14到16规格的仪表接线片(见下图。用6/3×2 1/2英寸的螺钉和螺母把一个装上压扁的仪表接线片的长的航空钢缆的两端。1门6英寸的钢缆相当于14到16号的电缆线。
接线片安到伸缩梁的末端背面(在那应该为安装留有一个孔,如果没有,自己钻一个)。
把钢缆在线轴上绕一圈后拉到另一端拉紧。尽量把多余的去掉并以接线片为引导做一个安装标记。钻孑L并用6/32×1/2英寸的螺钉和6/32的螺母安装接线片。组装后应该像下图所示。
上一篇:给机器人长个“眼睛”






