ǰ ��
���ҵ��������һ����ˮ��5000��6000�ĺ��׳����������ߡ��ɼ��̽�˵������Ĵ������������Ĵ��ɰ�װ�ں����ϵ���̨Һѹ����ֱ��������ñ����õ����ٶȡ��ҹ��ɿ���λ��̫ƽ���в���Ϊ���͵��ƽԭ�����ϸ����źܺ�����༰������[1]�����׳����ﲻͬ��½�ص��ʣ�����ǿ�Ƚϵͣ����н����������ԡ��������ԡ�������ҵ�����˵���ʻ����������������Բ�ƥ�䣬�������Ĵ����ȴ�����Ϊ��֤���ҵ�����˵İ�ȫ���ߣ�Ӧʹ�����������ʺϳ��������Եı仯�������������⣬��Ĵ�ʽ��ҵ���������߷������Ƽ������о���������������ɿ�ϵͳ��ȫ��ҵˮƽ��
������������߷�������������о���daegun hong��paljoo yoon[2]�����һ�ֻ����ƶ��۲����ķ�������ϵͳ���ƶ��۲����������������ƶ����������Ħ��ϵ���ı仯����������о�����־�¡��Ŵ���������[3]���������������������ٹ��̵���ѧģ�ͣ��Ի�ת��Ϊ���ڶ������һ�ֻ���ģ��pid���Ƶ�������������asr�㷨��Ŀǰ��������Ĵ���������������ؼ����д����Σ��Ը��ӵ����µ����ҵ�����ˣ��Ʊ�Ҫ�����ǶԻ������������������ԣ���ʻ����ʶ���Լ�������������������о���Ҳ�ؽ��ٽ����Ƕ���Щ�������ʶ��
���ĸ������ҵ���������ߵ��ص�ͺ��������ص㣬���������ҵ�����˵���ѧģ�ͣ������ݻ���������ϵͳ�Ľṹ���ص㽨����Һѹϵͳģ�ͣ�����˻����˷�������ϵͳ���������ѻ�ת�ʵı�ʶ����������matlab����ƽ̨�����������ҵ�����˷�������ϵͳ���з��档
���ҵ�����˹������������о�
(1)��������ѧ����
���ҵ�������Ĵ��뺣�������ʮ�ָ��ӣ�ͼ1Ϊ���͵ĺ����������ι���ʾ��ͼ��sΪ����Ӧ�䣬pΪ��������ѹ����������ѹʱ���ƻ��ɷ�Ϊ��������[4]��
ֱ�߱��ν�(ѹ�ܽ�)�����Ĵ��Ժ����ѹ��С���ٽ����ʱ�����౻ѹ���������ܹ�����Ϊ����״̬����ͼ1ʾ��a��֮ǰ��
�ֲ����н�(��ʼ���Ա���)�����Ĵ��Ժ����ѹ�ش����ٽ���ض�С�ں���ļ�������ʱ������������Ա��Σ�����ѹ�����������Ա�������������ͼ1ʾ��a����b��֮�䡣
��ȫ�ƻ���(���Ա��������������Ļ�����)����ѹ����������������ļ������������Ա��������������Ļ����棬���౻����������ͼ1ʾ������“b”���Ӧ������һС����Ӧ����������ӡ������������ӵ�Ӧ�䣬������������������������ǰ��״̬��ͨ����Ϊ����ƽ��״̬��������ƽ��״̬ת��Ϊ��������״̬����ʾ���ʱ��ƻ���
�����Ϸ�����֪���������Ӧ�ù����ھֲ����нβ��ܽϺõ����ú����ṩ��ǣ�������ߡ�
(2)�Ĵ������������
�������Ĵ����ڽӴ���ĵ����ϲ����������á���ͼ2��ʾ��Ϊ��Ԥ�����ǣ�����ͻ�ת�ʣ���Ҫ�˽����ļ���Ӧ���ͼ��б���֮��Ĺ�ϵ�������ϵ���ɼ���������ȷ�����ڼ��������п��ü��а�����Ĵ��̵ļ������á�
���ⶨ�ҹ������ڵĺ���������Դ������Դ���0�IJ����������wong������¹�ʽ����ʾ����������
(1)
ʽ�У�k��ˮƽ���б���ģ����m��j������λ�ƣ�m��kr���������Ӧ����������Ӧ�����r/�max��

ͼ1 ������ι���ʾ��ͼ

ͼ2 �Ĵ��ļ�������
ͼ3 ���������ݺ�����ͼ
���ҵ������ģ��
(1)���ҵ�����˶���ѧģ��
����������ĺͼ��������غϣ��ӵضε���������Ϊ����ͬ�ԣ��Ĵ��ӵضεĸ��ɺ������ֲ�Ϊ���ȷֲ���
��������ֱ������ʱ���õ��Ĵ�����ģ�ͣ�
![]() (2)
(2)
 (3)
(3)
ʽ�У�m��������˵���ģ��������kg��j���Ĵ������������ת���ת��������kg·m2��ω���Ĵ���ת�����ٶȣ�rad/s��fxl���Ĵ��뺣�����ĸ�������n��fyl���Ĵ���ѹʵ������n��ftl���Ĵ�������������n��fw��������˺�ˮ������n��tml�����Ĵ������������أ�n·m��r��������Ч�뾶��m��
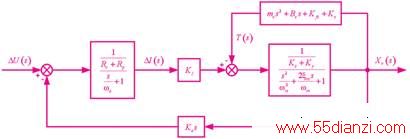
(2)Һѹ����ϵͳģ��
�ڻ�������ʻϵͳ�в��ñ����ã�����������ݻ����ٻ�·�����У���ر������ɵ�Һ����������Һѹ�ı�������б����ǵķ�ʽ�ı������õ��������Ӷ�ʵ��Һѹϵͳ���������ơ���Һ����������ѧģ�ͣ����õ磭��еת��Ԫ��ֱ��������о�˶����Ӷ��������ѹ�ź�uת��Ϊ��о��λ����xv��
���������������Ȧ�Ķ˵�ѹ�������̣�
δu(s)=lsδi(s)+(rc+rp)δi(s)+kesxv(s) (4)
��������Ķ�̬��ƽ�ⷽ�̣�
kiδi(s)=mts2xv(s)+btsxv(s)+(ks+ky)xv(s)+t(s) (5)
��о��̬��ƽ�ⷽ�̣�
t(s)=[mvs2+bvs+(kv+kfv)]xv(s) (6)
ʽ�У�l����Ȧ��У�h��rc��rp����Ȧ�ͷŴ������裬ω��ke����Ȧ��Ӧ���綯��ϵ����v��ki��������������������棬n/a��mt���������������kg��bt������ϵ����n·s/m��ks����������ĵ��ɸնȣ�n/m��mv����о������kg��bv����о��ճ������ϵ����n·s/m��kv����о���е��ɸնȣ�n/m��kfv�������ڷ�о�ϵ���̬Һ�����ն�ϵ����n/m��δi����Ȧ������a��ky�������������λ��������͵��㵯�ɵĸն�֮�ͣ�n/m��t�������⸺�أ�n��
��������ģ�Ϳ�ͼ��ͼ3��ʾ��
���ҵ�����˷�����ģ��ṹ���Ʒ���
(1)��ģ�л�����
�Ĵ�������ת����ÿ�������С�����뻬ת��λt��һ��С�����ڣ��Ա��ַ����Ĵ���ǣ��������ͬʱ���ܱ�֤��������һ���IJ������ܡ���ʵ�ַ����Ļ�ģ��ṹ����ʱ�������Ĵ�����ת��λ��Ϊ����Ŀ�꣬�����Ŀ�����뻬ת��Ϊλt����ô��ģ��ṹ�����Ĵ����Ȼ�תʵ���Ͼ��ǵ����Ĵ�ʵ������ת����Ŀ������ת��λt֮��IJ�ֵ����ʹ֮�������㡣
���Ƶ�Ŀ����Ѱ����������tm�Ŀ��ƹ��ɣ�ʹ�û�ת�ʸ������e�������㣬��λtΪ����������ѻ�ת�ʣ��������ѻ�ת�ʶ�ʱ��ĵ�����
������ѻ�ת����֪�����Ƶ�Ŀ��Ϊ�����������ص����룬ʹ�������λ(t)-λt(t)�������㣬����״̬�����н硣
��ģ������Ӧ���л��������ı�tm�Ŀ��ƹ��ɣ������л�����Ϊ��
![]() (7)
(7)
ʽ��c1Ϊ����ϵ����c1>0��eΪ�����ֻ�ת�ʵ���������e=λ-λt
(2)����μ-λ������״��λt����
ͨ�������������λt����Ѱ������
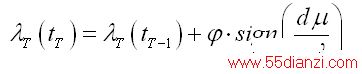 (8)
(8)
ʽ�У�φ��һ����Ϊ���IJ�����������ʱ��λt��ֵ����φ��ͬ������ʱ��λt��ֵ����φ�������ۼ�֮����ܹ��õ�ϵͳ����ѻ�ת�ʡ�
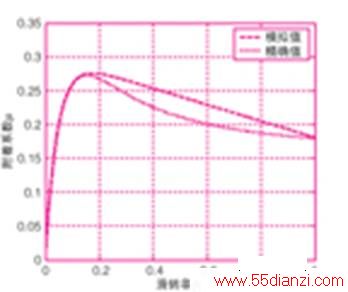
ͼ4 ��ͬ��ʻ���ʸ���ϵ������ת�ʹ�ϵͼ

ͼ5 ��ת״̬��켣ͼ
������
(1)��ת�ʱ�ʶ����
���Ĺؼ��֣����� ������ ������-���ܳ�������֪ʶ���� - ������-���ܳ�






