本文首先介绍了网络化控制技术模型装置的设计,分别阐述了控制实验模型的整体设计和以太网控制系统的设计。上层监控软件采甩LabVIEW图形化开发环境设计。然后针对参数整定过程中出现的困难,提出了将神经网络模糊PID自整定技术应用到该系统中的方案。该模型装置包含了工程应用中许多控制参数,可以满足不同程度的仿真实验和研究需要。
随着网络技术的发展,Internet正在把全世界的计算机系统、通信系统逐渐集成起来,形成信息高速公路,形成公用数据网络。在此基础上,传统的工业控制领域也正经历一场前所未有的变革,从传统的控制系统向以网络化为特征的控制方向发展,形成了新的控制网络。
控制系统的结构从最初的计算机集中控制系统(CCS),到第二代的集散控制系统(DCS),发展到现在流行的现场总线控制系统(FCS)。而以太网又逐渐与现场总线结合并进入工业控制领域。
网络的发展使自动化系统与工业控制系统在体系结构、控制方法、人机协作方法等都发生了重大变化,一方面,自动化与工业控制需要更深层次地渗透通信与网络技术。另一方面,通信网络的管理与控制也要求更多地采用控制理论与策略。同时也带来了新韵课题,其中之一就是网络环境下的控制方法与算法需要创新。
因此,本文针对网络化控制技术进行了模型的设计研究,本模型具有很好的开放性和可靠性,不但能够模拟工业现场的某些常见被控对象,进行具体控制回路设计,而且可以进行网络化环境下控制算法应用与改进的具体研究。
1 硬件系统设计
此网络化控制技术模型的硬件系统主要分两个部分进行设计,分别是:现场控制模型装置的设计和网络控制系统的建设。
1.1 现场控制模型装置的设计
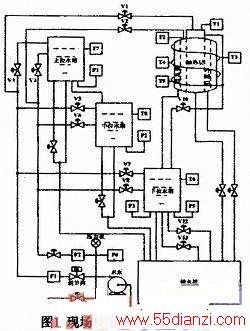
系统现场模型装置是基于工业过程物理模拟对象,用于模拟工业生产现场的实际被控对象的多功能实验装置。系统参数全面,涵盖了工业生产现场中液位、流量、压力、温度等典型热工参数,可实现系统参数辨识、单回路控制、串级控制、前馈控制、比值控制等多种控制形式。
现场控制模型装置主要由加热炉、上位水箱、中位水箱、下位水箱和储水箱以及电磁阀、水泵、温度、压力、流量等现场仪表组成。现场控制模型装置结构如图1所示。
1.2 网络控制系统的建设
以太网具有传输速度高、低耗、易于安装和兼容性好等方面的优势,由于它支持几乎所有流行的网络协议,所以在商业系统中被广泛采用。近些年来,随着网络技术的飞速发展,由于交换技术以及网络带宽的大大增加,以太网开始与现场总线技术结合进入控制领域,形成了新型的以太网控制网络技术。本平台网络控制系统采用以太网控制系统。
用NI公司生产的具有以太网接口的FiELDPoint网络模块,配合合适的I/O模块和模拟仪表,可以对现场实验模型装置的温度、液位等参数进行以太网控制。以太网控制系统结构如图2所示。

2 软件平台建设
2.1 监控软件设计
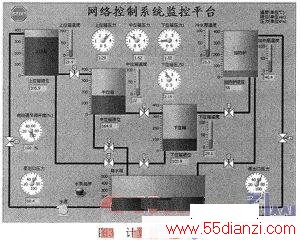
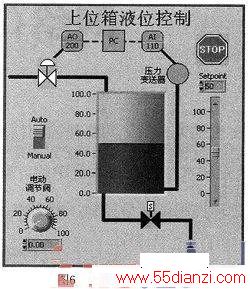
本系统上层监控软件采用LabVIEW图形化开发环境设计,不但实现该模型实验装置现场参数的计算机监测,而且具体实现过程控制实验的计算机仿真。图3为该系统的监控界面之一。
2.2 实验研究
以上位箱液位作为一个简单的调节对象进行液位控制实验。
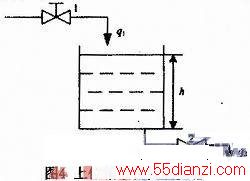
上位箱液位控制为单容自衡液位被控过程。由图4所示,上位箱流入量为g1,改变阀1的开度可以改变q1的大小。流出量为q2,它取决于用户的要求和液位h的高低,改变阀2的开度可以改变q2;液位h越高,水箱内水的静压力增大,q2也增大。动态方程式是:
![]()
式中T=FRs,K=KμRs。Rs位液阻;Kμ为比例系数;F为液容。将该式改写成拉氏变换式:
![]()
这就是上位箱液位对象的传递函数,式中T称为对象的时间常数,而K则叫做对象放大系数。
由此,设计上位箱液位控制实验工作原理图和液位控制程序,如图5和图6所示。
2.3 神经网络在本控制系统参数整定和优化过程中的应用
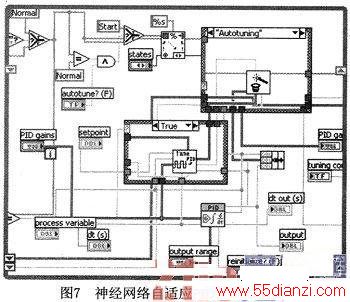
图7为用LabVIEW编写的神经网络模糊自适应PID控制器的框图,主要由自适应向导、自适应模块、以及PID控制模块三部分组成。自适应向导为用户提供一个用户友好的界面,用户可以介入自适应调节过程,并对一些参数进行设定。自适应模块根据设定自己过程参数,再按照神经网络自适应算法对PID参数进行自动在线整定,整定完成后的PID参数对现场设备内的参数进行修正。
但实际的对象阶跃响应实验结果表明,上位箱液位对象的实际特性与理想的一阶惯性环节差异较大。这一方面是因为由于受到硬件限制,进水阀的线性以及灵敏度不够高,而另一方面也是因为干扰的缘故,水泵的启停所造成的冲击等。另外由于通信网络所产生的传输时间延迟,该对象还要附加一个纯延迟环节。
直接采甩Ziegler-NIChol整定方法时,由于对象阶跃响应曲线不够精确,实际的被控对象也不是一阶惯性环节,所以整定效果不太理想。实验测得的闭环阶跃响应曲线如图8所示。
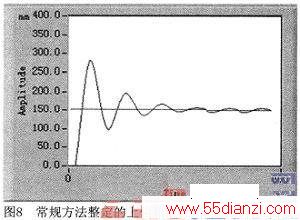
从图8可以看出,当采用常规的整定方法时,整定效果不太让人满意,系统的超调过大,调节时间也太长。
而且当由于别的干扰因素,如气温上升等而影响到系统的特性参数时,还需要重新测定对象的开环阶跃响应曲线,费时费力,缺乏自动性。
当采用基于神经网络模糊PID控制算法的在线整定方案后,系统的闭环阶跃响应曲线如图9所示。
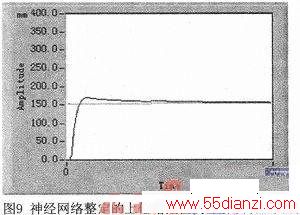
从上面实验测得的响应曲线可以看出,采用神经网络模糊自适应控制算法后,控制指标有了明显改善,超调减小,稳态精度也得到了提高。更为重要的是神经网络模糊自适应控制算法可以适应对象动态特性参数变化,并且可以在线自动整定,从而具有较好的应用价值。
3 结束语
网络技术作为信息技术的代表,其与控制系统的结合将极大地提高控制系统的水平。网络化控制技术作为控制、网络和计算机多种技术交叉融合的产物,它的发展是控制系统日趋复杂化的体现,其理论基础跨越多个学科,应用范围遍及多个领越。作为一个新兴的研究领域,网络化控制系统很多问题的研究仅是一个开始,还存在着大量课题有待进一步的深化研究。
本网络化模型装置将以太网与传统工业控制融合在一起形成新的控制网络,在保证控制系统原有的稳定性、实时性等要求的同时,又增强了系统的开放性和互操作性,提高了系统对不同环境的适应性。






